Paso 5: Robot magnético circuito
Para otros Picaxe proyectos ver aquí: http://www.inklesspress.com/picaxe_projects.htm
Y aquí:
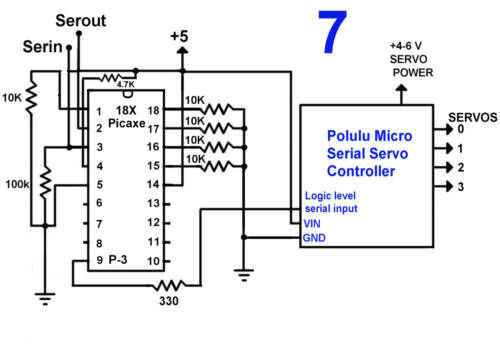
El Picaxe controla el robot enviando comandos en serie a un controlador de micro servo serie Polulu. El controlador de Polulu es muy pequeño y mantendrá continuamente hasta 8 servos en cualquier posición que se ponen en. Comandos simples desde el Picaxe permiten controlar fácilmente la posición, velocidad y dirección de los servos. Recomiendo altamente este regulador para todo tipo de robots servo basado.
El esquema muestra cómo se conectan los cuatro servos. Servo 0 y 1 guía 1" imán a lo largo del eje X e Y. Servo 2 es un servo de rotación continuado que puede girar el imán de más de 360 grados. Servo 3 inclina el imán un poco hacia adelante y hacia atrás para bajar y levantar a la pinza.
Un corto vídeo del robot a una moneda de diez centavos, ver aquí: http://www.youtube.com/watch?v=wwT0wW-srYg
O haz clic en el siguiente vídeo:


")



 ¿")






