Paso 8: Otros Robots magnéticamente accionados
Flying robot imán en un centavo.
Mientras que en realidad no vuela, se desplaza en un campo magnético controlado ordenador, como esos juguetes que suspender un pequeño globo de la tierra. También tiene una pinza que se expande cuando se calienta con un laser y luego agarra como se refresca. Por desgracia, los extremos sur y norte magnético de robots son verticales, por lo que no hay forma de controlar el giro rotacional precisamente orientar la garra. Es ligeramente más grande que el robot más pequeño que hice que se muestra en el paso 9.
http://www.sciencedaily.com/releases/2009/04/090413205339.htm
http://News.cnet.com/8301-11386_3-10216870-76.html
Robot de piscina imán
Un robot microscópico realmente que es una espiral con un imán en un extremo. Con un armazón externo y campo magnético rotativo, puede ser dirigida en cualquier dirección y nadar bajo el agua.
http://www.sciencedaily.com/releases/2009/04/090418085333.htm
Cámara orientable píldora por imanes.
http://www.Spectrum.IEEE.org/aug08/6469
Robots médicos.
http://www.medindia.net/News/view_news_main.asp?x=5464
Cámara magnéticamente controlada.
http://www.UPI.com/Science_News/2008/06/05/Controlled_pill_camera_is_created/UPI-60051212691495/
Aquí están algunas pinzas magnéticamente controlados microscópicos que pueden ser químicamente o calor activado.
http://www.sciencedaily.com/releases/2009/01/090114210651.htm
Por desgracia, estas pinzas de micro no pueden liberar una vez coge. Son más como una trampa de oso microscópica de una pinza completamente funcional.
http://www.sciencedaily.com/releases/2009/01/090112201137.htm
http://www.RSC.org/chemistryworld/News/2009/January/13010901.asp
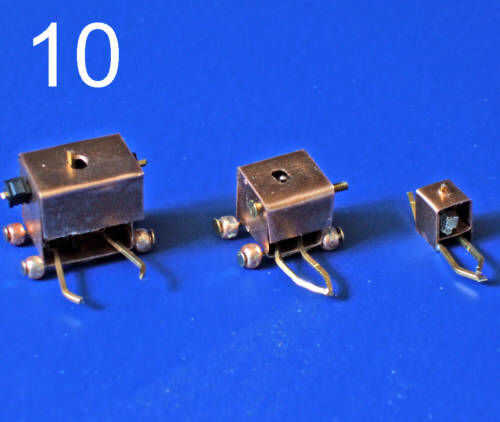
foto 10 muestra los Magbots R-19, R-20 R-21, los tres robots que hice para estos experimentos. El más pequeño uno fue hecho más pequeño mediante la eliminación de un eje y las ruedas. Una cola de alambre impide que vuelque hacia atrás.


")



 ¿")






