Paso 16: Realizar pruebas y terminar la caja de Control
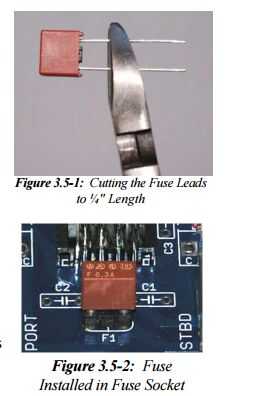
1) Localice el fusible. Si sus puntas son más que unos ¼"(6 mm), corte ambos conduce a que la longitud, como se muestra en la figura 3.5‐1
2) Instale el fusible en el portafusibles, como en la figura 3.5‐2.
3) localizar un multi‐meter con una función de "ohmetro" (medidas de resistencia eléctrica) para llevar a cabo unas pruebas rápidas. Estas pruebas le dirá si hay problemas de soldaduras en el PCB (que puede causar el fusible soplar y detener su ROV de trabajo) o un problema de interruptor. No conecte la batería hasta la prueba eléctrica en los siguientes pasos ha sido completada con éxito. Configurar el medidor para medir resistencia (ohms) y asegúrese de que usted puede decir la diferencia entre un circuito "corto" (~ 0 ohmios – toquen las puntas de prueba) y un circuito "abierto" (sondas de resistencia "infinita" – no tocar). Algunos metros tienen un "beep" para indicar continuidad, como el causado por un corto circuito.
4) para probar para cortos, conecte las puntas de prueba de su medidor a las dos pinzas del cable de alimentación (no importa la polaridad de los cables). Deje desconectado el cable de anclaje.
5) ahora activar cada uno de los cuatro interruptores individualmente y en todas las combinaciones. En ningún momento debe usted conseguir una baja resistencia leyendo (cualquier continuidad). Prueba todas las combinaciones de interruptor y asegúrese de que no hay ninguna combinación que muestra un corto circuito. El medidor debe leer una resistencia infinita en todo momento.
6) entonces prueba los interruptores con el tether cable conectado. Debería ver una lectura de baja (no cero) de unos 5 a 15 ohmios cuando se active ningún interruptor, como muestra en el medidor de la resistencia de la bobina del alambre que está dentro de cada uno de los motores. Si no ves estas lecturas bajas para cualquier posición de trabado, que tenga una conexión de soldadura pobres, un interruptor mal, un cable dañado o conector en el cable de anclaje, o un problema de la hélice.
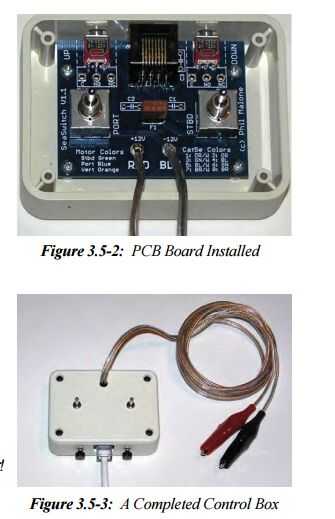
7) una vez que estés seguro de que hay no hay cortos circuitos y que los motores de hélice lecturas adecuadas, puede terminar de armar la caja de control. Coloque la placa en la caja de control, pasando los botones de actuador de interruptor de botón con cuidado por los dos agujeros en el frente de la caja y asegure el PCB en la caja usando los cuatro tornillos pequeños de plata, como se muestra en la figura 3.5‐2.
8) Pulse los dos tapones de pulsador en los botones del actuador, como se muestra en la figura 3.5‐3.
9) Instale la tapa en la caja, doblando cuidadosamente los hilos del cable de alimentación dentro de la caja como se baja la tapa en su lugar. Asegure la tapa con los cuatro tornillos negros.
10) Conecte el enchufe de conector RJ45 del cable de anclaje en el conector RJ45 de la caja de control.


")










