Paso 5: Sellar los motores para que la cera no puede entrar
1) 1. Encontrar el punto rojo en la parte blanca de cada uno de los motores, junto a sus terminales eléctricos. El punto rojo marca el positivo (+) terminal. Terminal de la marca (+) (más cercano al punto rojo) con el marcador.
2. para mantener la cinta en los laterales del motor suficientemente delgado para caber en la caja, lo mejor es
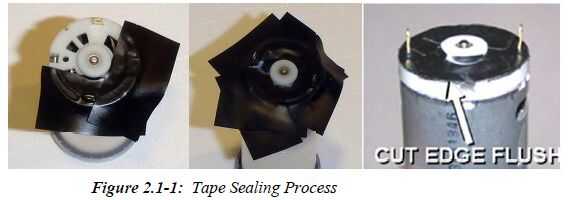
primero cubre ambos extremos del motor, luego recorte el extremo cintas al ras con los lados y cubrir los lados pasado. Uso cinco, corto, 1" trozos de cinta en los extremos, tal como en el proceso a continuación. La figura 2.1‐1 muestra los primeros pasos de la grabación.
En el extremo terminal, empuje suavemente un trozo de cinta sobre una terminal para empujar a través de la cinta. Coloque con cuidado el borde de esta cinta para arriba a lo largo del lado del jefe motor‐shaft (área elevada en el centro).
Continúe haciendo esto para todos los pedazos de cinta cinco, superpuestas alrededor de la terminal del motor para cubrirlo completamente.
Luego recortar todas las cintas que se extiende más allá del borde de la cáscara del motor (corte con unas tijeras que se inclina hacia el extremo del motor para obtener un borde limpio y al ras).
3) Repita este proceso de grabación en el otro extremo del motor. Asegúrese de cortar la cinta de descarga de piezas en el borde del motor como antes.
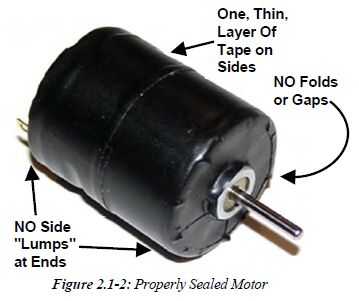
4) 4. Para los lados, envuelva la cinta alrededor del motor. Comience en un extremo con el borde de la cinta que se extiende aproximadamente 1/16"(~ 2 mm) más allá del extremo del motor, por lo que puede estirar en el extremo para formar un buen sello. Estire la cinta mientras usted. IMPORTANTE: Solamente una sola capa alrededor del motor de cinta (para que se ajuste en el tambor de cubierta de proa con espacio a la izquierda para la cera, presiónelo para sellar el borde posible.
5. Repita los pasos 2 y 3 para los otros motores. Los motores sellados deberían verse como en la figura 2.1‐2.
6. Asegúrese de que todos los agujeros en los motores son sellados bien por presión, frotando y apretando la cinta por toda la superficie de cada cáscara del motor.
7. verificar que el sellado motores todo ajuste en una hélice con espacio alrededor de él para la cera para macetas.


")










