Paso 21: Conectar el UBEC al controlador de vuelo


En este paso conectamos el UBEC al controlador de vuelo.
Ahora que hemos terminado con el UBEC para alimentar la tarjeta de programación ESC podemos cambiar cable de salida de la UBEC al controlador de vuelo. Ahora una de las partes más débiles del diseño del controlador de vuelo KK2.1, en mi opinión, es la forma en que se suministra con energía. Poder de la KK2.1 sólo puede ser conectado a los pines de entrada del Motor 1 o a través del receptor de radio, sin embargo, poder para el servo debe estar conectado a una de las entradas de motor que no sea de Motor 1. Por lo tanto, tendremos que dividir la potencia de salida de la UBEC, por lo que podemos para alimentar el receptor de radio y conexión de Motor 8.
Crear Cable de alimentación
Por desgracia, no pude encontrar un producto para dividir la potencia de salida de la UBEC, así que tendremos que crear nuestro propio. La buena noticia es que esta parte es bastante fácil de hacer.
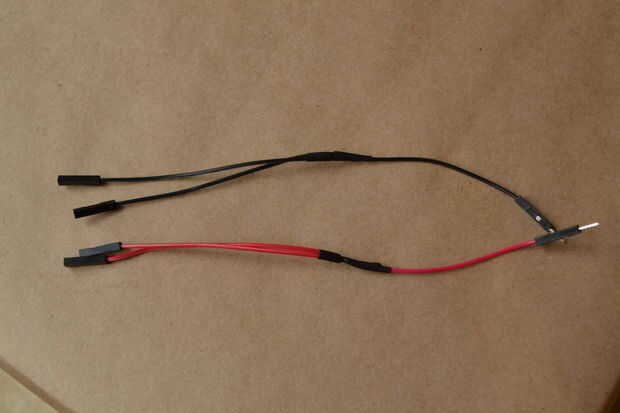
Vamos a hacer alguna cirugía en cuatro de nuestros cables de puente. Por lo tanto, sacar dos cables de puente rojo y dos cables de puente negro. Cortar todos los cables por la mitad y agarrar dos conexiones hembra rojizas, dos conexiones hembra negras, una conexión macho rojo y una conexión macho negro.
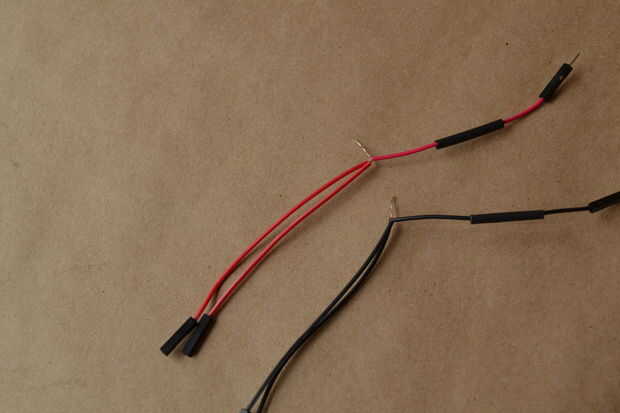
Así que tira de aproximadamente 1/2" de la aislación desde el extremo de los cables. En primer lugar, coloque un poco, cerca de 1 pulgada de largo, pieza del tubo sobre los cables rojos y negros macho de encogimiento. Tuerza los cables de red. Entonces tuerza todos los cables negros. Ahora debe tener un conector en "Y" rojo y un conector en "Y" negro.
Utilice un poco de soldadura para fijar juntos los cables torcidos. Finalmente, la contracción de la tubería sobre el empalme del resbalón y utilizar una pistola de calor o un encendedor para reducir hacia abajo.
Alimentar al receptor de Radio
Ahora, recordemos desde cuando tenemos conectado el receptor de radio para el controlador de vuelo, dijimos todos los pernos de la tierra y todos los pernos de la energía en el receptor de radio se conectan entre sí. Por lo tanto, no importa a qué canal conectamos el cable de salida de potencia UBEC. También recordar que el pasador fuera del receptor de radio tierra (negro/marrón), el pin central es energía (rojo) y el interior es señal (amarillo). Así, en los pines sin usar canal 8, enchufe en el mazo de cables de salida de energía hicimos un segundo atrás con el cable negro en el exterior y el cable rojo en el medio.
Al realizar la conexión, deberá encenderse la pantalla en el KK2.1. También verá una luz roja en el receptor, que indica que el receptor se alimenta así. No bien terminamos todavía aunque.
Conectar alimentación a salidas Motor KK2.1
Así que hemos conectado la UBEC potencia de salida para el receptor de radio que proporciona energía a la Junta KK2.1, pero necesitamos también para alimentar las salidas motor KK2.1 para alimentar a los servos, que nos conectará, junto con el CES, en un poco más.
Así que si nos fijamos en la Junta KK2.1 de la parte inferior (al lado del botón) se encuentran las conexiones de salida del motor en el lado derecho de la pantalla. El KK2.1 tiene un total de ocho las conexiones del motor, pero vamos a usar sólo cuatro. Al igual que con el receptor de radio, las conexiones vienen en grupos de tres pernos. El perno de la señal es la más cercana a la pantalla, el pin de alimentación está en el centro, y el conector de tierra está más alejada de la pantalla.
Así, usando las otras dos conexiones de nuestros cables UBEC, conecte el cable de tierra (negro) al pin fuera de la conexión del motor parte inferior y conecte el cable de corriente (rojo) a la patilla central.


")


")


")




,")