Paso 23: Conecte el CES y el Servo al controlador de vuelo


En este paso se conectará los tres CES y el servo al controlador de vuelo.
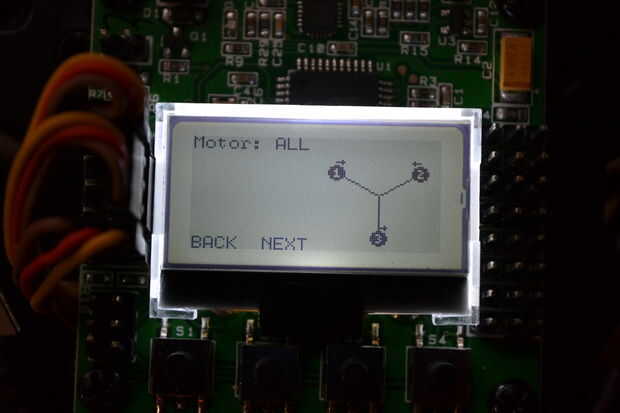
Si usted acaba de terminar el último paso y no pulse ningún botón, usted debe ser mirando el KK2.1 tricopter motor diseño. Si este es el caso, saltar sobre el procedimiento para ver el diseño de motor más abajo. De lo contrario, si usted navega lejos de la gráfica de diseño de motor, usted necesitará hacer copia de seguridad para saber cómo conectar los motores:
- En la pantalla principal de KK2.1, uno con "Seguro" escrito en él, acceda al menú pulsando el botón de la derecha.
- Desplácese hacia abajo hasta "Mostrar diseño de Motor" y presione el botón Enter de extrema derecha.
Identificación de los motores
Vamos a comenzar haciendo que entendemos donde conectará nuestros CES en el tablero de control de vuelo KK2.1. Si usted está buscando en el tablero de la parte inferior (el lado con los botones) las salidas de motor se encuentran en el lado derecho de la pantalla, frente a las conexiones del receptor de radio que hicimos anteriormente. Hay ocho conexiones del motor en el KK2.1. La conexión Motor 1 es el en la parte superior, y la conexión del Motor 8 está en la parte inferior, con las otras salidas motor numeradas en orden.
Como con la salida del receptor de radio y pines de entrada, las conexiones del motor vienen en sets de tres pernos. La columna más cercana a la pantalla es señal (cables amarillos), en el centro es (cables rojos), y la columna en la parte exterior es tierra (cables marrón/bloque).
Así que ahora entendemos donde se encuentran las conexiones del motor y que pines corresponden a que entradas ESC; la única pieza de información que tenemos es que motor el KK2.1 identifica como Motor 1 y Motor 2 Motor 3. También tenemos que saber donde conectar el servo.
Esto es donde el gráfico de diseño motor que hemos cargados entra en juego. Si te fijas bien en el gráfico, verá que se numera cada motor en el diseño. Por lo tanto, de la gráfica:
- El motor parte delantera izquierda es Motor 1
- El motor de la delantera derecha es Motor 2
- El motor posterior es Motor 3
Vamos a hacer las conexiones ahora.
Conexión de los CES
A partir de 1 de Motor, el motor de frente izquierda, conecte el paquete de tres hilos en la fila superior de motor salidas en el KK2.1 con el cable amarillo más cercano a la pantalla y el cable marrón en el exterior.
Luego conecte el Motor 2, el motor de la delantera derecha, del mismo modo.
Por último, conecte el Motor 3, el motor trasero.
Conectar el Servo
Con tres CES todos conectados a los KK2.1 en los lugares correctos, la última conexión que tenemos que hacer es la conexión del servo. Una vez más, el diseño del motor de KK2.1 nos dirá dónde conectar el servo. Con la distribución del motor en la pantalla, presione el botón "Siguiente". Esto nos da alguna información adicional sobre el Motor 1, específicamente la dirección de giro. Pulse "Siguiente" dos veces más y descubrirá que Motor 4 es para la conexión del servo. Si continúas pulsando siguiente, usted también encontrará que las restantes cuatro salidas motor están sin usar.
Usted necesitará utilizar un cable de extensión de servos porque el cable de conexión en el servo no es suficiente para llegar al controlador de vuelo. Por lo tanto, enchufe el extremo macho del prolongador de servos en el cable de servo hasta que enganche el clip pequeño.
Luego, conecte el otro extremo del cable de extensión de servo en la salida del Motor 4 en KK2.1 con el cable blanco más cercano a la pantalla y el cable negro más lejos lejos.


")


")


")




,")