Paso 28: Mezclador Editor

El Editor mezclador se utiliza para ingresar información a del controlador de vuelo KK2.1 sobre el diseño de la tricopter. En este paso, se programa el KK2.1 para corregir un problema específico en la configuración predeterminada.
Obviamente no estamos acabados edificio nuestro tricopter, como, por ejemplo, todavía no tenemos propulsores, pero si fueras a volar ahora mismo tu tricopter, sería girar alrededor incontrolablemente en el aire y se estrellaría. La razón que esto sucedería es que el KK2.1 piensa que el servo del motor trasero está orientado en la dirección opuesta lo que realmente es.
Cuando la mosca su tricopter, la voluntad de motor trasera siempre inclinarse ligeramente para contrarrestar la inducida por el desvío de las hélices. Sólo el KK2.1 piensa que el servo se apunta en la dirección opuesta por lo que en realidad se inclina en la dirección del desvío, haciendo el tricopter girar alrededor como un trompo. Vamos a solucionar este problema.
Introducción del Editor mezclador
Realmente aunque vamos a empezar con una introducción al Editor mezclador de KK2.1 porque es una parte extremadamente importante de conseguir el mejor rendimiento de su tricopter.
Vamos a empezar hablando de cómo el KK2.1 controla tu tricopter. Para controlar el movimiento de la tricopter, el KK2.1 ajusta la elevación producida por cada uno de los tres rotores y ajusta la inclinación del motor trasero. Ajustando la cantidad de elevación producido en forma correcta, el KK2.1 puede hacer el arte de ascender, descender o inclinar para mover en cualquier dirección.
Para determinar exactamente cómo controlar cada motor, el KK2.1 utiliza, como se podría esperar, muchas matemáticas. No voy a explicar cómo funciona este math - francamente no entiendo todo yo - pero le explicará los fundamentos matemáticos que se basan todos los cálculos de vuelo. Para calcular la elevación requerida por cada motor correctamente, el KK2.1 debe conocer la posición exacta de cada uno de los tres motores en relación a sí mismo. Conociendo estas posiciones, el KK2.1 puede calcular la influencia que cada brazo tiene sobre la orientación de la tricopter. Con esta información, el KK2.1 puede calcular cómo ajustar la elevación producida por cada motor y mover la embarcación.
Afortunadamente para nosotros, el diseño de nuestro tricopter realmente coincide con la configuración por defecto en el KK2.1 (a excepción del hacia atrás problema servo abordaremos en un momento), por lo que no necesitamos hacer ninguna matemática ahora para ajustar el diseño del motor. Creo que es interesante saber cómo la KK2.1 controla el tricopter aunque.
Fijación de los ajustes de Servo
En primer lugar, acceder al Editor mezclador es muy fácil, sólo entrar en el menú KK2.1 como lo hemos hecho antes, desplácese hacia abajo hasta "Mezclador Editor" y presiona Enter.
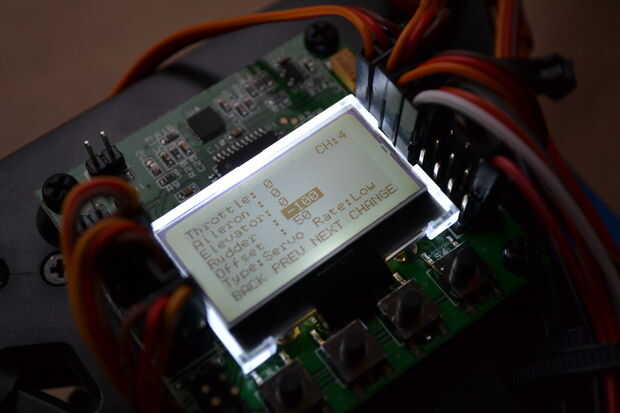
Entonces ves un montón de palabras y números en la pantalla. Cubriremos más información sobre todas estas cosas en un paso posterior, pero por ahora, mira en la esquina superior derecha de la pantalla. Verá CH:1. Esto indica que la configuración que se muestran es para 1 Motor (el motor de frente a la izquierda). Queremos llegar a la configuración de lo servo, que es Motor 4.
Tan con el CH:1 puso de relieve, presione el botón de la extrema derecha para cambiar a CH:2. Pulse el botón dos veces más para llegar a CH:4, que es nuestro servo. Otra vez hay un montón de opciones aquí, pero el que nos interesa es el ajuste de timón . De forma predeterminada, la configuración del timón tendrá un valor de 100.
Desplácese hasta el ajuste de timón pulsando el botón "Siguiente". Luego presione el botón "Cambiar" para ajustar la. Queremos cambiar el timón a -100. Es así, simplemente mantenga presionado el botón "Abajo" hasta llegar a -100.
Cambiar este valor de 100 a -100 solo cambiará la dirección del servo, que es lo que tenemos que hacer.
Una vez más, el Editor mezclador es muy importante para afinar su tricopter, así que definitivamente lo verá otra vez. Para obtener más información, vea paso 34.


")


")


")




,")