Paso 34: Templar su Tricopter
Cada tricopter vuela sólo un poco diferente así que usted tendrá que ajustar la configuración de su tricopter. Esta página va sobre los conceptos básicos de tricopter tuning.
Yo podría han engañado le un poco en el ultimo paso porque no realizan totalmente con su tricopter. Realidad construyendo su tricopter consigue solamente parte del camino hacia volar con éxito. Usted tendrá que ajustar la configuración de su tricopter para optimizar sus características de vuelo. Específicamente, usted tendrá que ajustar su configuración de "Roll y Pitch de la PI". Las programaciones deben recibir su tricopter vuelan bastante bien, pero otra vez, cada tricopter vuela un poco diferente y cada piloto controla su tricopter un poco diferente. La clave de afinar correctamente tu tricopter, y dudo que esta va a ser sorprendente, es saber lo que cada uno de hacer de ajustes del controlador de vuelo.
Ahora, no quiero entrar en toneladas de matemáticas o ingeniería eléctrica para explicar el funcionamiento interno real del lazo de PID de un controlador vuelo en este paso. Si usted quiere aprender cómo PID lazos de trabajo, hay un montón de información que se puede acceder con una rápida búsqueda en Google. En este paso solo quiero cubrir cómo cada parámetro de configuración de lazo PID de su controlador de vuelo afecta rendimiento de tricopter.
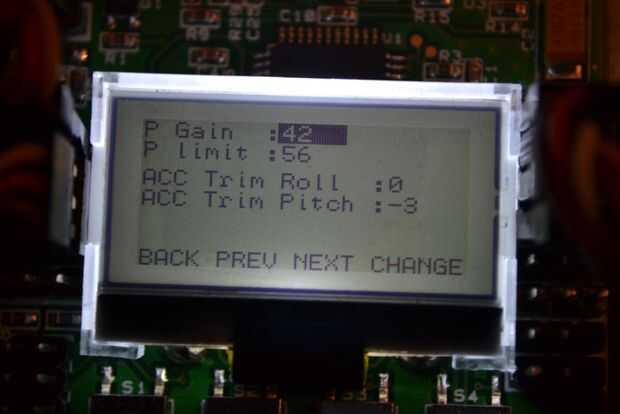
Todas estas opciones son accesibles desde la sección del menú principal KK2.1 PI Roll y Pitch.
Ganancia P
La ganancia de P (que significa ganancia proporcional) parámetro controla básicamente cómo su tricopter prioriza entrada piloto frente a entrada de los sensores a bordo del controlador de vuelo.
Un valor alto del parámetro P ganancia significa que las lecturas de los sensores será muy importante. Un bajo valor de la ganancia de P significa que la entrada de piloto será muy importante.
Si la ganancia P está demasiado alto, usted podría notar tricopter oscilante o tipo de contracción en el aire. Este efecto es causado por intentos frenéticos de controlador de vuelo para corregir incluso las discrepancias más pequeñas del sensor. Si la ganancia P está demasiado baja, la nave parecerá lento y lento para reaccionar a los cambios de orientación en el control de entrada. Probablemente será difícil mantener el tricopter aire si la ganancia de P es muy baja ya que el tricopter estaremos esperando, el piloto, de los trabajos necesarios para mantener y oficio estable, y por desgracia, nuestros cerebros y nuestros pulgares no son lo suficientemente rápidos como realizar los ajustes rápidos necesarios para mantener la nave en el aire.
Obtener
I ganancia (que significa ganancia Integral) controla cómo rápidamente el tricopter responderá a los cambios en la orientación angular.
En otras palabras, digamos que estás volando su tricopter y desea seguir avanzando. Para ello, nos incline la tricopter hacia adelante. Esta inclinación hacia delante dirige algunas de elevación de tricopter hacia atrás en lugar de todos la elevación dirigida hacia abajo, que hace el tricopter avanzar. Cuando suelta el palo, el tricopter volverá a una posición nivelada.
La inclinación hacia adelante ni volver a una posición de nivel suceden instantáneamente aunque. Obviamente lleva un poco de tiempo para el tricopter moverse realmente. I ganancia básicamente controla la agresividad la tricopter intenta lograr la inclinación señalada.
Si ganancia valor es demasiado bajo, que el tricopter parecerá lento y lento para responder a la entrada de control. Si ganancia es excesiva, que el tricopter oscilará otra vez en el aire mientras lucha por mantener una posición perfecta.
Ajuste ganancia P
A partir de los valores por defecto, si usted siente que su tricopter es un poco demasiado lento, aumente la ganancia P en intervalos de cinco hasta llegar a la respuesta que desea. Si se observa el encofrado de tricopter en el aire, de nuevo la ganancia P apagado un poco.
I ajuste ganancia
A partir de los valores por defecto, si se observa su tricopter no detener y estabilizar después de mover los palillos y devolverlos al centro, el aumento incrementos de ganancia de cinco hasta llegar a un más rápido tiempo de respuesta. Desea llegar a un punto donde el tricopter regresa a una posición de nivel rápidamente y no vagan en el aire.
I aumento de valor es también útil si usted está volando en condiciones de mucho viento donde es más importante para el tricopter corregir su posición angular y no Haz movido por el viento como mucho.


")


")


")




,")