Paso 9: Arduino, rampas y cableado del Motor








En nuestro marco de láser son los agujeros de montaje para nuestro Arduino Mega. Utilizar separadores de plástico para que la Mega se encuentra fuera de la madera contrachapada. Los agujeros alineados perfectamente aunque encontramos que teníamos que presentar las cabezas de un par de los pernos (ligeramente) como los orificios de montaje en el Arduino estaban justo al lado de pins de cabecera.
Monte el Arduino al marco con el conector USB hacia la parte inferior - deje suficiente espacio para conectar el cable USB. La Junta de rampas se monta en el Arduino.
Antes de instalar las rampas tienen una lectura de 14 de paso y lo que encontramos con el calor de la cama y el MOSFET que controla. Básicamente nos encontramos con que el MOSFET tiene muy caliente incluso con un disipador de calor en él. Después de leer a un número de reprap hilos del Foro hemos decidido cambiar el MOSFET a un IRLB8743PBF. Sería más fácil hacerlo ahora que más adelante - pero también se puede encontrar la calidad de la placa de las rampas es mejor que el nuestro y el MOSFET estándar es aceptable.
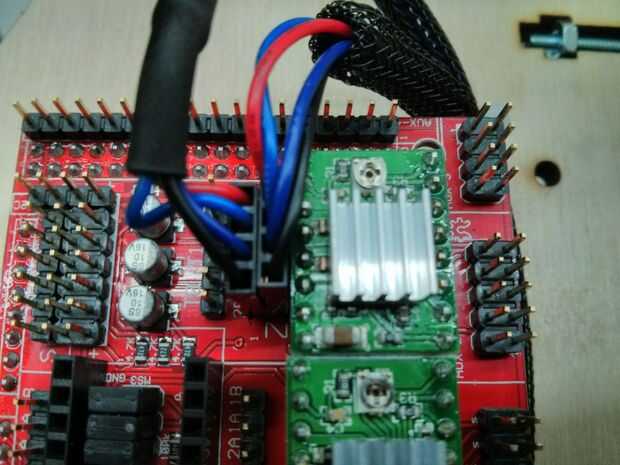
La Junta de rampas tiene lugares para 5 "drivers" cada uno para la X, Y y Z motores, uno para la extrusora y un lugar para una extrusora segunda opcional. Estamos usando 4 de los 5 para esta compilación. Si la placa de rampas vino con los drivers instalados previamente en la placa debe eliminarlos y comprobar los puentes debajo de ellos. Debe haber 3 filas de puentes y dependiendo de cómo son puenteados afectará el motor paso a paso. Acuerdo con este cuadro debemos puente todos los 3 pines a 1/16 de vuelta del motor por pulso/paso. Así que asegúrese de que todos los 3 pines están puenteados. Si no tienes puentes que son el mismo tipo que se encuentran en placas base de PC, disco duro unidades de disco SCSI etc.. Asegúrese de montar el controlador en el tablero con la orientación correcta - si no le soplará componentes. El controlador también tiene un pequeño potenciómetro para ajustar la cantidad de corriente que dé el motor. Esto tendrá que ser ajustada más adelante - demasiado poca corriente y el motor no le paso, demasiado y el conductor se calienta y entra un apagado térmico.
Una vez instalados los controladores podemos pasar cableado de los motores de X, Y y Z. Nos encontramos con un kit de cables en ebay que cuenta con una selección de 2, 3 y 4 terminales que encajan en las rampas de tablero puentes. Son el estándar de 0,1" espaciado.
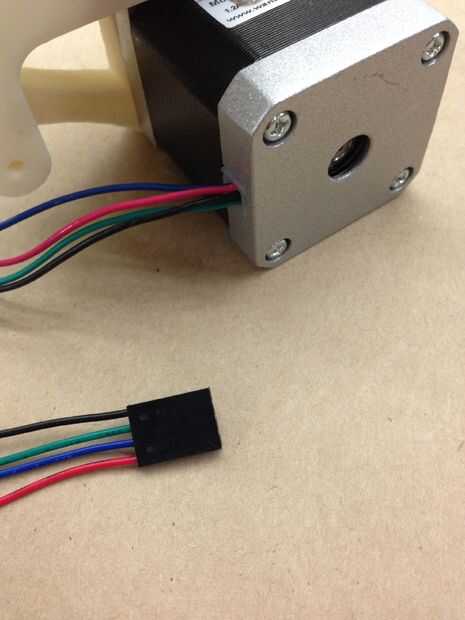
Los motores de pasos NEMA 17 que necesitamos utilizar tienen 4 cables que salen de ellos. Son 2 juegos de bobinas y usted necesitará usar un multímetro para asegurarse de que usted tiene los pares correctos. RepRap el wiki tiene información sobre cómo se hace - básicamente le medidor de los pares de vuelta. Encontrará circuito abierto no pares y baja o ninguna resistencia a un par. Marca que los cables son un par.
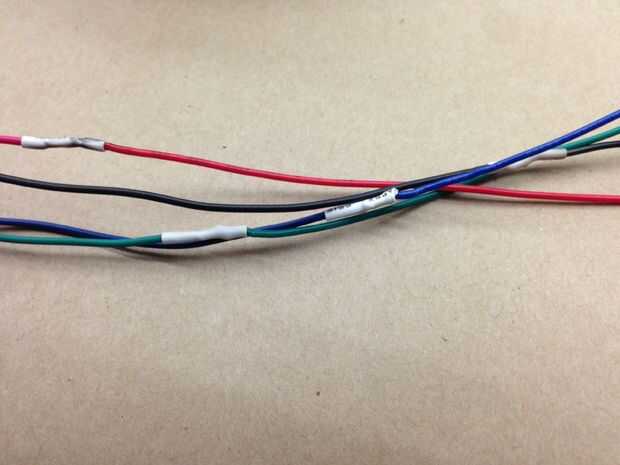
En el conector de 4 pines los pares están al lado del otro - así que es wire1 del primer par y 2 del primer par de alambre, 1 del segundo par de alambre, alambre 2 del segundo par. Cuando hemos empalmado los cables que funcionan detrás a las rampas escalonadas las uniones para que si rompió el aislamiento que hemos utilizado alguna vez los alambres no corta. Se utilizó tubo pequeño encogimiento en las uniones soldadas y trenzado de alambre mangas con el tubo del encogimiento en los extremos para hacer el cableado se vea aseado.
Encamine los alambres de donde los están fuera del camino. Para los motores Z y Y usted puede hacer la longitud bastante exacta como los motores no se mueven. Para el X motor que tener en cuenta que se mueve hacia arriba y hacia abajo en el eje z. El motor de la extrusora se moverá tanto de arriba abajo y de lado a lado. En esta etapa debe ser capaz de conectar los motores de X, Y y Z. Temporalmente Instale el motor c/w de extrusora para averiguar cuánto tiempo hacer los cables. Los cables del caliente-fin y también que un cable del ventilador en este "telar" y todos se deben colocar juntos - aunque no necesariamente en el mismo trenzado manga.
Echa un vistazo a la Junta de rampas, junto a los controladores usted verá 4 conectores para los motores. Uno de X, Y y estirador de motores y 2 sistemas de los motores Z. Enchúfelos en cualquier manera alrededor por ahora (coincide con la orientación de los Z-motores) - queremos ver si los motores se mueven.








")



")
