Paso 10: Hacer el eje de movimiento
En este punto hemos querido comprobar nuestro cableado y ver si los motores trabajaría. Para hacer esto usted necesitará descargar el firmware de rampas. (Hemos utilizado Marlin). Esto se puede encontrar en este repositorio de github. Utilice el enlace "Descarga ZIP" y descomprimir la carpeta en tu escritorio o similar - como sabe usted donde se encuentra. Usted también necesitará el IDE de Arduino, si no tienes instalado. El IDE de Arduino puede encontrarse aquí. Versión actual de este instructable es 1.0.5. Instalar el IDE, enchufe el cable USB a Arduino, dejar los 12V a la Junta de rampas fuera. Abra el archivo marlin.pde o marlin.ino desde el software de Marlin.
Haga clic en la ficha Configuration.h y compruebe las siguientes líneas:
#define STRING_VERSION_CONFIG_H __DATE__ "" __TIME__ / / construir la fecha y la hora
agregar la fecha entre el "" así:
#define STRING_VERSION_CONFIG_H __DATE__ "08 de julio de 2014" __TIME__ / / construir la fecha y la hora
también la línea que aparece debajo:
#define STRING_CONFIG_H_AUTHOR "(ninguna, configuración por defecto)" / / quién hizo los cambios.
cambiar el ninguno y configuración por defecto a algo como esto:
#define STRING_CONFIG_H_AUTHOR «(Steve, primera prueba)» //Who realizó los cambios.
Encontrar la velocidad de transmisión de línea más abajo
#define BAUDRATE 250000
Esto debería ser 250000
A continuación seleccione el tipo de Motherboard, Tarjeta madre para encontrar:
#define Motherboard, Tarjeta madre
Si es 7 cambiar a 33
Ya tenemos los sensores de temperatura conectados necesitamos desactivar para probar el movimiento del motor.
Busque la línea:
#define TEMP_SENSOR_0 -1
Cambiar esto:
#define TEMP_SENSOR_0 0
La dirección de que movimiento de los motores puede cambiarse invirtiendo los cables en el tablero de rampas o mediante el archivo Configuration.h. Busca las líneas:
#define verdadero INVERT_X_DIR / / para Mendel establece en false, para conjunto de Orca en true
#define falso INVERT_Y_DIR / / para Mendel establece en true, para Orca se establece en false
#define verdadero INVERT_Z_DIR / / para Mendel establece en false, para conjunto de Orca en true
y cambiar a:
#define falso INVERT_X_DIR / / para Mendel establece en false, para conjunto de Orca en true
#define verdadero INVERT_Y_DIR / / para Mendel establece en true, para Orca se establece en false
#define falso INVERT_Z_DIR / / para Mendel establece en false, para conjunto de Orca en true
También tenemos que cambiar el número de vueltas que el motor eje z hace para moverlo hacia arriba y hacia abajo y también la velocidad de alimentación del motor Z
Busque la línea:
#define DEFAULT_AXIS_STEPS_PER_UNIT {78.7402,78.7402,200.0*8/3,760*1.1}
y cámbiela a:
#define DEFAULT_AXIS_STEPS_PER_UNIT {78.7402,78.7402,4000,760*1.1}
Busque la línea:
#define DEFAULT_MAX_FEEDRATE {500, 500, 5, 25}
y cámbiela a:
#define DEFAULT_MAX_FEEDRATE {500, 500, 1, 25}
Yo generalmente copiar y pegar la línea original, entonces comente la línea original con dos diagonales principales, es decir, / /
También puse una línea de comentario sobre él, así que sé que he cambiado el archivo. por ejemplo:
SR cambiado para deshabilitar temporalmente el sensor de temperatura
Así puedo buscar el archivo SR y encontrar mis cambios y también puedo volver a una original configuración fácilmente.
Guardar los cambios y prueba de compilar el bosquejo. Si está bien entonces subirlo a Arduino.
Notas:
Usted tendrá que asegurarse de que tener la Junta correcta (Mega 2560) y el puerto seleccionado en el menú "Herramientas" en el IDE de Arduino
Cada vez que hagas un cambio en el archivo de Configuration.h necesita compilar/subirlo a tu Arduino para que los cambios surtan efecto.
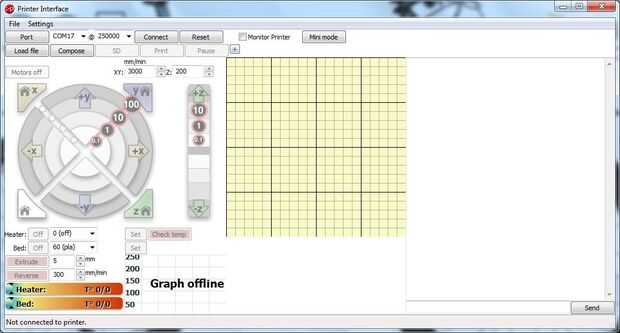
Para controlar la impresora también necesitará software de Pronterface . Descargar el tiraje-Win-Slic3r para Windows o Mac y lo descomprimimos en una carpeta y ejecutar el archivo pronterface.exe.
Cuenta que hay otros programas como Anfitrión Repetier de Repetier Software que funcionará con el i3 de Prusa y tienen la misma funcionalidad que Pronterface.
OK, revise que todo está correctamente conectado a la Junta de rampas y las rampas es conexionados en el Arduino Mega. Enchufe en y de la energía hasta la fuente de 12V. Enchufe el cable USB a su PC/ordenador portátil si no lo es ya.
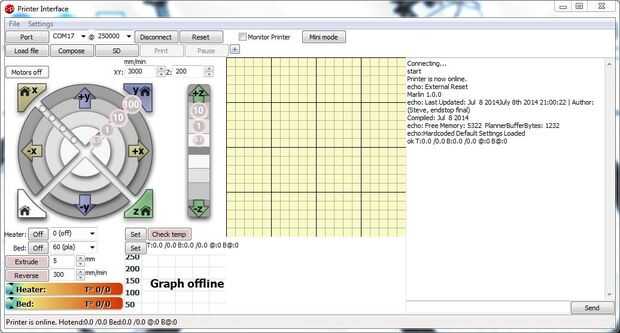
En Pronterface Compruebe que están seleccionados el puerto correcto y la velocidad, el puerto será la misma utilizada para descargar el firmware para el Arduino, la velocidad debe ser de 250000. Haga clic en el botón "conectar". En el lado derecho verá el software conectar y detectar la Junta rampas. Buscar autor: debe ser igual a lo que pones en el archivo Configuration.h. Usa las flechas de movimiento X, Y y Z y tratar de mover los motores - trate de mover 1mm o 10mm por el momento. Como mover el ratón sobre la cuadrícula de X, Y y Z se destacan las direcciones y distancia. No trate de inicio de los motores en este tiempo - usted tendrá que poner topes sobre el tablero de rampas, es decir, no haga clic en el icono "Inicio". Si mueve accidentalmente demasiado los motores y llegar a un límite de viajes y tratar de seguir adelante solo Desconecte la fuente de alimentación o pulsar el botón reset en el tablero de rampas.
También puede probar los botones de "extrusión" y "revés" para probar el motor de la extrusora.
Si los motores "charla" y no muevan el eje que tendrá que ajustar el bote pequeño en la tarjeta de conductor. Idealmente usted debe usar un destornillador de plástico de cerámica que se garantice que no corta nada. Para ajustar el controlador primero desconecte la corriente de 12V a las rampas desconectando la fuente de alimentación o tirando los clips de las rampas del tablero, luego haga clic en la"prendat" botón en Pronterface. Dar el bote un ligero gire hacia la derecha, conecte todo de nuevo, conectar a las rampas mediante Pronterface e inténtelo de nuevo. Seguir subiendo en 1/8 de un incrementos de vuelta hasta llegar a movimiento. Probablemente encontrar el motor girará en un sentido. Esto es normal por ahora no tiene topes instalados y no has alojado el eje - por lo que el software no sabe cuán lejos puede ir en una dirección u otra.
Fue un gran momento en nuestra generación cuando finalmente llegamos a los motores para mover el eje y estirador de motor - está vivo!
Antes de que probamos los topes en los pasos que necesita para asegurarse de que cada eje se mueva en la dirección correcta.
Permite iniciar con el eje x, todo enciende y abrir Pronterface, conectar a la tarjeta, haga clic en el eje x 10mm menos y el carro deben moverse de derecha a izquierda, haga clic en el eje x y 10mm y se deben mover a la derecha. Si es al revés entonces potencia todo lo y flip X enchufe del motor en el tablero de rampas alrededor. Encender todo y vuelva a intentarlo.
Para el eje y, empezar con la cama en el medio. Haga clic en el eje y 10mm menos y la cama debe moverse hacia la parte posterior, haga clic en el eje y más de 10mm y se deben mover hacia el frente. Si es al revés entonces apague todo y voltear la clavija del eje y en el tablero de rampas alrededor. Encender todo y vuelva a intentarlo.
Para el eje z al hacer clic en 10mm menos los motores debe ir en sentido contrario y bajar el extrusor, al hacer clic en 10 mm además de los motores deben ir hacia la derecha y subir la extrusora. Si es al revés entonces todo se apague tanto eje del tirón y en las rampas del tablero. Encender todo y vuelva a intentarlo.
Notas:
1. nos encontramos con el más barato combo de Arduino/rampas de ~$42.00 conseguimos fuera de eBay que los conductores necesitan ajuste, sin embargo más costoso (~ $80,00) combo de SainsSmart se ajustaron los controladores y los motores sólo funcionados. Parcialmente a través de las pruebas que llegaron a soplar el eBay comprada Arduino cuando puse una tarjeta de conductor en mal y todo enciende - así que ten cuidado con todo.
2. Si tienes Pronterface abre y desea compilar/cargar cambios en el Arduino en primer lugar, haga clic en "desconectar" en Pronterface - esto permitirá que el IDE de Arduino utilizar el puerto. Una vez que se suben los cambios puede dejar abierto el IDE de Arduino y conectar al Arduino/rampas de Pronterface. El Arduino solo necesita control del puerto cuando subes los cambios cumplió - sin necesidad de cerrar y volver a cargar el IDE cada vez.
3. Guarde el archivo de Marlin a menudo cuando los cambios de trabajo. Es una buena idea para mantener notas sobre lo que funciona y no funciona.








")



")
