Paso 4: Electrónica y programación

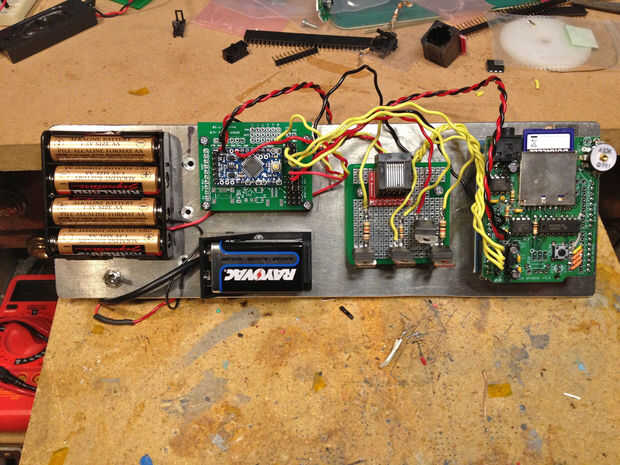


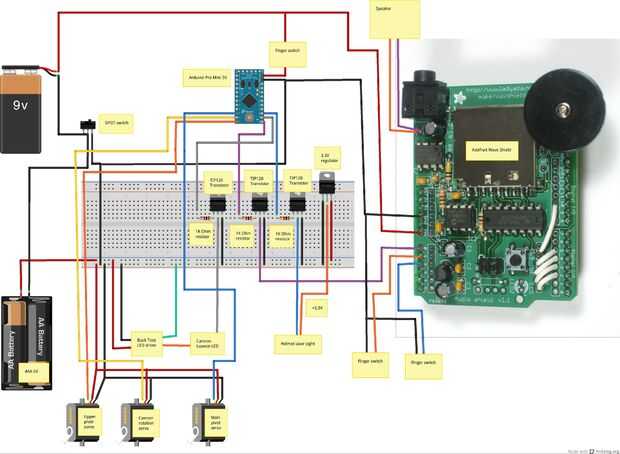
Ahora que tuve la mecánica hace que necesitaba para hacerla mover. Usé un Arduino Mini Pro para manejar las entradas y movimientos servo y y un Arduino Pro con un protector de la onda de Adafruit para manejar los efectos de sonido. Hay una pequeña tabla que tiene tres transistores en él-los transistores encienda la mira láser de casco y disparar el cañón LED y efectos de sonido. La Junta también tiene un 3.3V regulador para proporcionar energía para la vista del laser del casco.
El cañón de LED es un Luxeon azul brillante que es conducido por un conductor actual constante del "Buck Toot". Con el fin de evitar cualquier problema de ruido del servo los Arduinos son accionados por una batería de 9V y todo lo demás es alimentado por cuatro pilas alcalinas "AA". Yo pude han utilizado baterías de NiCad, NiMH o LiPo pero ya que estábamos en una apretada agenda no quería que los chicos tengan que preocuparse de baterías especializadas o carga largo veces-podían conseguir baterías de repuesto en cualquier tienda de comestibles.
Entradas de control sería tres Interruptores táctiles punta de dedo pequeño. Los interruptores son de encendido/apagado así que si Jamie empuja uno de ellos un sonido se repita una y otra vez hasta que se apague. Además el cañón seguirá moverse a través de ha programado secuencia hasta que se apague. Los interruptores de punta de dedo se conectaron a la mochila mediante un cable ethernet que funcionaría a lo largo del brazo de Jamie y los interruptores se sentarían dentro de los dedos del guante.
La electrónica se monta en una 1/8" espesor placa de aluminio con separadores de plástico y tornillos 4-40.
Se muestra el diagrama de cableado completo y he incluido el sonido sonido de archivos uno es para el cañón, una es el depredador "chasquidos" y el último sonido es el rugir del depredador.
Los Arduinos se programan utilizando un desglose básico de FTDI. Escribí una guía de programación de Arduino aquí-
Aquí está el código para el Arduino Mini Pro- controla los movimientos del cañón:
#include < Servo.h > / / incluye la librería servo
Servo1 servo; crea una instancia del objeto servo para controlar un servo
Servo servo2;
Servo servo3;
int servoPin1 = 9; pin de control de servo
int servoPin2 = 8;
int servoPin3 = 7;
ledPin1 int = 11; pin de control de LED
int ledPin2 = 12; pin de control de láser de la vista
int soundPin1 = 10; pin de control de tarjeta de sonido
void setup() {}
servo1.Attach(servoPin1); se fija el servo en el pin al objeto servo
servo2.Attach(servoPin2);
servo3.Attach(servoPin3);
pinMode (ledPin1, salida); establece el pin LED como salida
pinMode (ledPin2, salida);
pinMode (soundPin1, salida); establece el sonido pin como salida
digitalWrite (ledPin1, LOW); establece el pin del LED baja (apaga)
digitalWrite (ledPin2, LOW);
digitalWrite (soundPin1, bajo);
}
void loop() {}
digitalWrite (ledPin2, HIGH); establece el pin LED alta (enciende)
servo3.Write(170); brazo de cañón plantea
servo1.Write(140); gira el cañón hacia arriba
Delay(2000);
servo2.Write(40); gira el cañón de la cabeza
Delay(2000);
servo2.Write(110); gira el cañón hacia la cabeza
digitalWrite (ledPin1, HIGH);
digitalWrite (soundPin1, HIGH);
Delay(10);
digitalWrite (ledPin1, LOW);
digitalWrite (soundPin1, bajo);
Delay(4000);
servo2.Write(60); gira el cañón de la cabeza
servo1.Write(120); gira el cañón hacia arriba
Delay(1000);
digitalWrite (ledPin1, HIGH);
digitalWrite (soundPin1, HIGH);
Delay(10);
digitalWrite (ledPin1, LOW);
digitalWrite (soundPin1, bajo);
Delay(3000);
servo2.Write(120); gira el cañón hacia la cabeza
servo1.Write(150); gira el cañón hacia abajo
Delay(2000);
digitalWrite (ledPin1, HIGH);
digitalWrite (soundPin1, HIGH);
Delay(10);
digitalWrite (ledPin1, LOW);
digitalWrite (soundPin1, bajo);
Delay(1000);
servo1.Write(140);
Delay(3000);
servo1.Write(170);
Delay(500);
servo2.Write(90);
Delay(1000);
servo3.Write(10);
digitalWrite (ledPin2, LOW);
Delay(5000);
}
Aquí está el código para el escudo de onda - (cortesía de Adafruit)
#include < FatReader.h >
#include < SdReader.h >
#include < avr/pgmspace.h >
#include "WaveUtil.h"
#include "WaveHC.h"
Tarjeta SdReader; Este objeto contiene la información de la tarjeta
FatVolume vol; Contiene la información de la partición en la tarjeta
FatReader raíz; Esto contiene la información para el sistema de archivos en la tarjeta
FatReader f; Esto contiene la información del archivo estamos jugamos
Ola WaveHC; Este es el único objeto (audio) de la onda, puesto que sólo jugaremos uno a la vez
#define DEBOUNCE 100 / botón debouncer
Esta práctica función devolverá el número de bytes actualmente libres en RAM, ideal para depuración!
int freeRam(void)
{
extern int __bss_end;
extern int * __brkval;
int free_memory;
Si ((int) __brkval == 0) {}
free_memory = ((int) & free_memory)-((int) & __bss_end);
}
Else {}
free_memory = ((int) & free_memory)-((int) __brkval);
}
volver free_memory;
}
void sdErrorCheck(void)
{
Si (! card.errorCode()) retorno;
putstring ("\n\rSD I/O error:");
Serial.Print(Card.ErrorCode(), hexagonal);
putstring (",");
Serial.println(Card.errorData(), hexagonal);
while(1);
}
void setup() {}
Configurar puerto serie
Serial.Begin(9600);
putstring_nl ("WaveHC con 6 botones");
putstring ("memoria RAM libre:"); Esto puede ayudar con la depuración, es malo quedarse sin RAM
Serial.println(freeRam()); Si es menor de 150 bytes escribe con problemas!
Configurar los pines de salida para el control de la DAC. Este los pernos se definen en la biblioteca
pinMode (2, salida);
pinMode (3, salida);
pinMode (4, salida);
pinMode (5, salida);
pin13 LED
pinMode (13, salida);
habilitar las resistencias pull-up en las patillas del interruptor (entradas analógicas)
digitalWrite (14, alto);
digitalWrite (15, alto);
digitalWrite (16, alto);
digitalWrite (17, HIGH);
digitalWrite (18, alta);
digitalWrite (19, alto);
Si (! card.init(true)) {//play con spi de 4 MHz si 8MHz no funciona para usted
Si (! card.init()) {//play con spi de 8 MHz (por defecto más rápido!)
putstring_nl ("tarjeta init. no se pudo!"); Algo salió mal, permite imprimir por qué
sdErrorCheck();
while(1); entonces 'detener': ¡ no!
}
permiten optimizar la lectura - algunas tarjetas pueden tiempo de espera. Desactivar si tienes problemas
card.partialBlockRead(true);
Ahora buscaremos una partición FAT!
parte de uint8_t;
para (parte = 0; parte < 5; parte ++) {/ / tenemos hasta 5 ranuras en
Si (vol.init (tarjeta, parte))
rotura; encontró uno, permite la libertad bajo fianza
}
Si (parte == 5) {/ / si terminamos por no encontrar uno :(
putstring_nl ("No válida partición FAT!");
sdErrorCheck(); Algo salió mal, permite imprimir por qué
while(1); entonces 'detener': ¡ no!
}
Permite decir que el usuario lo que encontramos
putstring ("partición de uso");
Serial.Print (parte, DEC);
putstring (", el tipo es grasa");
Serial.println(Vol.fatType(),DEC); ¿FAT16 o FAT32?
Intente abrir el directorio raíz
Si (! {root.openRoot(vol))}
putstring_nl ("no se puede abrir raíz dir!"); Algo salió mal,
while(1); entonces 'detener': ¡ no!
}
¡ UF! Llegamos pasado las partes difíciles.
putstring_nl("Ready!");
}
void loop() {}
putstring("."); Sin comentarios para ver si no está ejecutando el bucle
interruptor (check_switches()) {}
caso 1:
playcomplete ("Sonido1. WAV");
rotura;
caso 2:
playcomplete ("Sonido2. WAV");
rotura;
caso 3:
playcomplete "(SOUND3. WAV");
rotura;
caso 4:
playcomplete ("SOUND4. WAV");
rotura;
caso 5:
playcomplete ("SOUND5. WAV");
rotura;
caso 6:
playcomplete "(SOUND6. WAV");
}
}
check_switches() bytes
{
Static byte anterior [6];
estática mucho tiempo [6];
byte de lectura;
byte que presiona;
Índice de bytes;
presiona = 0;
para (índice byte = 0; índice < 6; ++ índice) {}
lectura = digitalRead (14 + índice);
Si (leer == baja & & anterior [índice] == alto & & millis() - tiempo [índice] > DEBOUNCE)
{
interruptor presionado
tiempo [índice] = millis();
presiona = index + 1;
rotura;
}
anterior [índice] = lectura;
}
devolver el número de conmutador (1-6)
retorno (presionado);
}
Reproduce un archivo completo de principio a fin sin pausa.
void playcomplete(char *name) {}
llamar a nuestro ayudante para buscar y reproducir este nombre
playfile(Name);
mientras (wave.isplaying) {}
no hacer nada durante la reproducción de su
}
su hecho reproduciendo
}
void playfile(char *name) {}
ver si el objeto ola está haciendo algo
Si (wave.isplaying) {/ / así que ya está reproduciendo algo, stop!
Wave.STOP(); Basta
}
Buscar en el directorio raíz y abre el archivo
Si (! f.open (raíz, nombre)) {}
putstring ("no puede abrir archivo"); Serial.Print(Name); retorno;
}
Leer bien el archivo y convertirlo en un objeto de onda
Si (! {wave.create(f))}
putstring_nl ("no un válido WAV"); retorno;
}
OK el tiempo para jugar! iniciar la reproducción
Wave.Play();
}







")
")




