Paso 5: El nuevo sistema de aceleración (Control electrónico de velocidad)
Primero tienes que adquirir la señal, procesarla y finalmente utilizarlo.
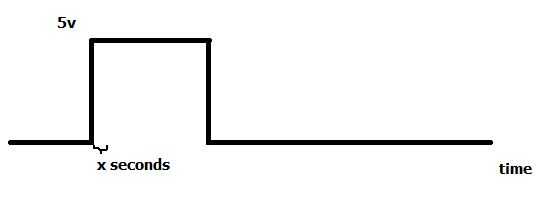
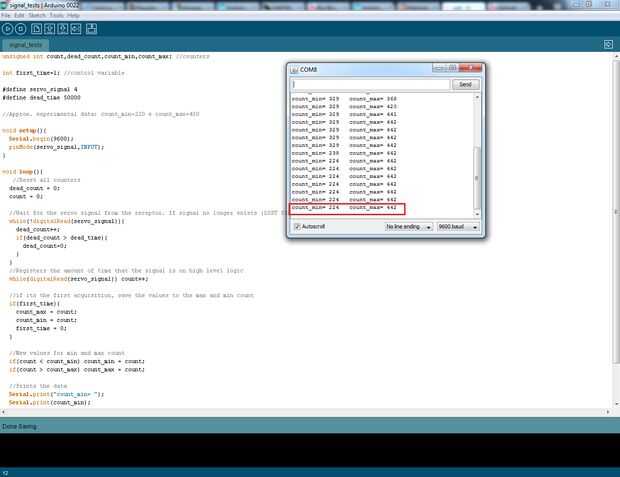
Para adquirir la señal escribí un código para el arduino (atmega8) leer la señal de servo que utiliza el receptor. Simplemente cuenta cada x segundos mientras que la señal está en la lógica de nivel alto (5v). Es la señal de servo en la figura 2, el nivel en que puede ser de 1 ms a 2 ms cada 20 ms. ahora conocer los valores de la señal y puede utilizarlo para controlar el motor. Fig 3 muestra la adquisición valores de cuenta de proceso y el max y min. Puede descargar el archivo signal_tests.pde en este post para la adquisición de la señal de la prueba.
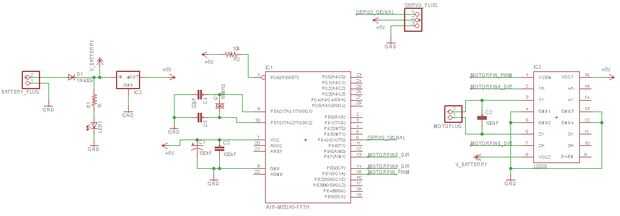
La izquierda lo único que hacer es utilizar los datos para controlar el motor. Para ello, escribí otro código y funciona como un encanto! El esquema electrónico y el código de arduino (atmega8) pueden descargarse aquí. El código está comentado, pero si alguna vez sientes perdido siempre puedes pedir a = 3.
Un video mostrando el nuevo sistema de aceleración está aquí:













