Paso 10: Codificación de tiempo.

Hey estamos casi ala justa. Para la codificación de este robot no necesita ningún conocimiento de codificación. Software de controlador de servo nos ayudará. Porque utiliza marcos!!!!!! y en tiempo Real!!!!!!
Abrir programa de servo controladores y conectar el controlador. Pero realmente cuidado. Cuando se conecta el regulador servo en computadora automáticamente tendrá los servos en 0 grados. Si conectas las articulaciones de tu robot en cualquier otro grado cada pierna hará movimiento diferentes y puede causar el fallo y tu robot puede hacer daño sí mismo. Así que ten cuidado en este proceso.
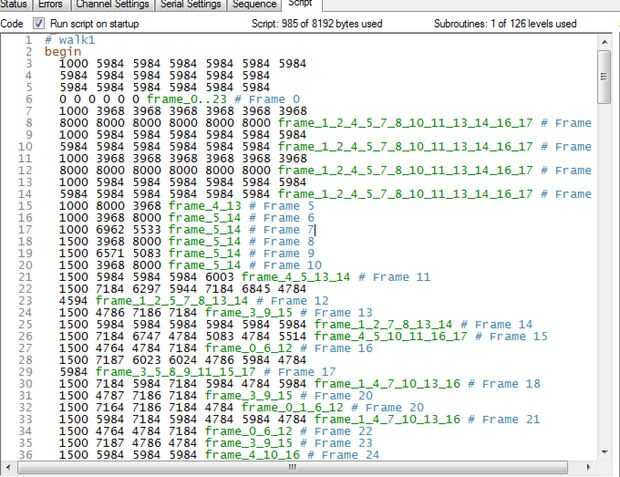
Después de tomar precauciones de crear marcos y arreglar el ángulo de los servos según una línea de tiempo. Lo verás en tiempo real. Entonces crea tu historia de movimiento y desplegar el código creado por el programa en el controlador de servos de tu hexápodo. Ver mi código en el cuadro. Fue creado por el programa.
Después de su implementación podrás mover tu robot por movimientos predefinidos.









