Paso 1: Preparar los componentes




Necesita tres potenciómetros de k 10 con patas que pueden caber en un protoboard.
La encontré aquí:
https://www.Adafruit.com/products/562
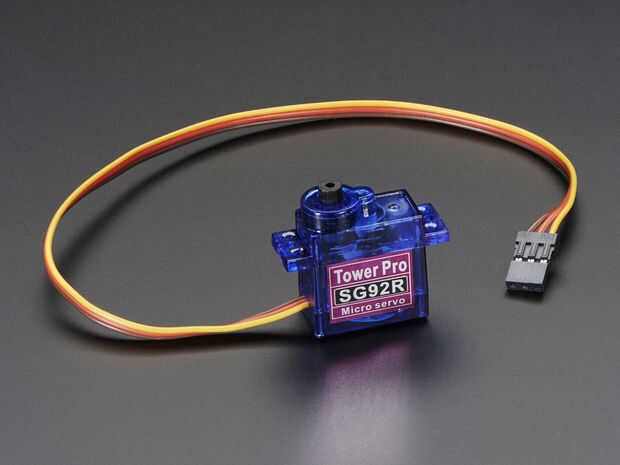
A continuación son los servomotores. Usé los más pequeños como la carga se movería sería muy pequeña y eran baratos.
https://www.Adafruit.com/products/169
Luego necesitas un paquete de baterías 4 AA:
https://www.Adafruit.com/products/830
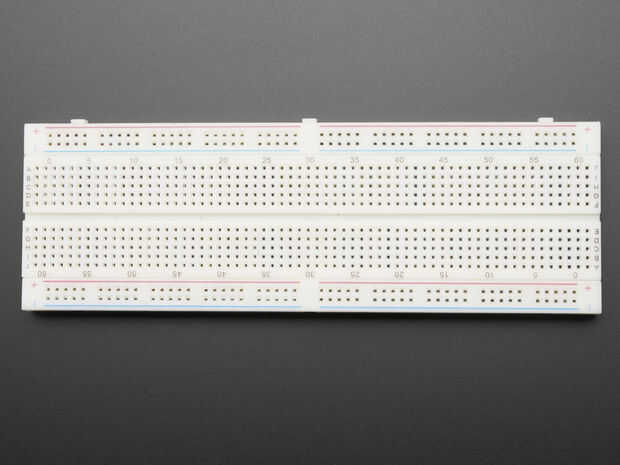
Un protoboard para conectar todo:
https://www.Adafruit.com/products/239
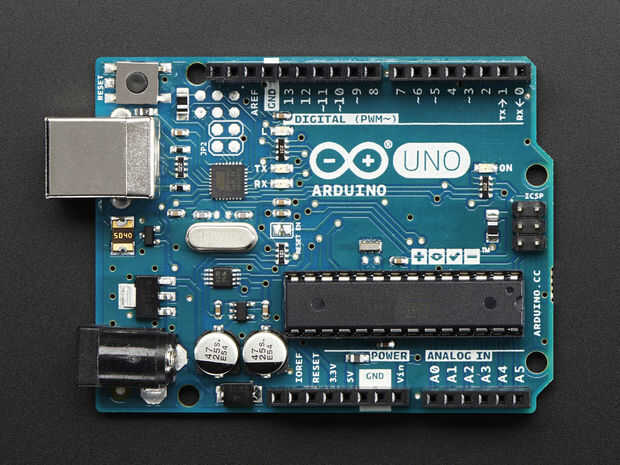
Un Arduino Uno R3 (al menos esto es lo que usé):
https://www.Adafruit.com/products/50
Un cable usb para conectar el Arduino a un pc y el poder que:
https://www.Adafruit.com/products/62
El software de Arduino IDE para cargar el programa que controlará los servos:
https://www.Arduino.CC/en/Main/software
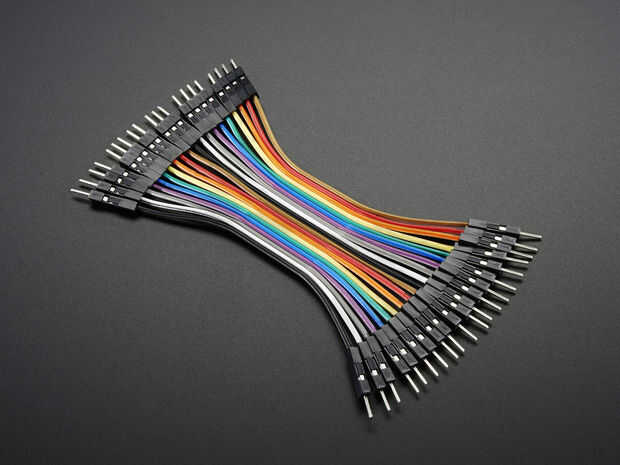
Algunos cables de puente macho/macho y un cable de puente para realizar las conexiones
https://www.Adafruit.com/products/1956
Pasadores de disidente encabezado que se utilizará para conectar sus motores a la placa. Me gustan estos porque no tienes que ajustar el divisor plástico para conseguir que montar en un protoboard.








")

")
