Paso 1: el hardware
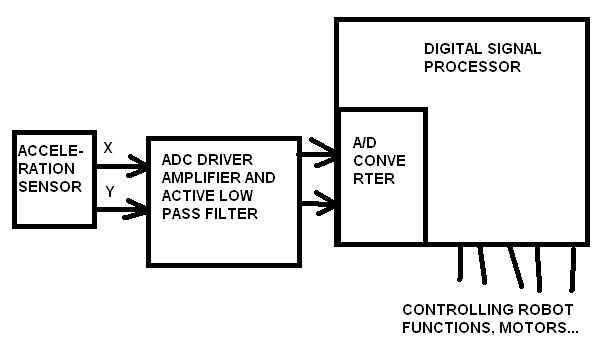

el sensor de aceleración detecta la aceleración (aceleración y desaceleración) del robot, crea una tensión de salida (Vout = Vbias + aceleración * número) que se mide por el y el convertidor analógico/digital en el DSP. En el DSP su mentionado aquí ya como números. Frecuencia de muestreo puede ser de 200-600Hz. He utilizado el sensor de MMA6270Q de www.freescale.com y el DSP TMS320F2811 de www.ti.com.
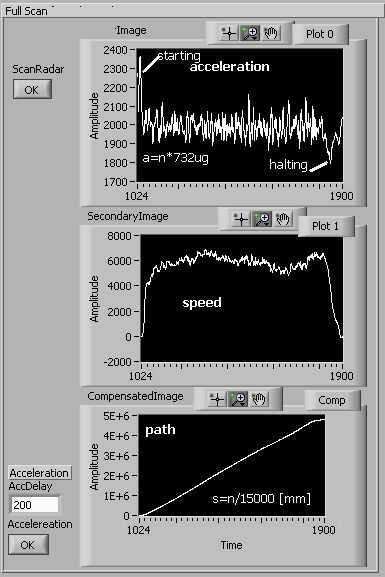
Tenemos studiet en el primer año en la Universidad, que la integral de la aceleración con el tiempo es igual a la velocidad real, y la integral de la velocidad es la distancia/camino real desde el punto de partida. He utilizado el DSP para hacer este doble integral numérico para producir esta distancia.
así, cómo funciona:
1. enviar un comando para la DSP que el robot tiene que ir hacia adelantados 350 milímetros.
2. el DSP lo convierte en otro número, como un límite de la distancia final (N_limit)
3. el DSP comprueba el valor de salida real del sensor, para establecerla como un base/sesgo para los cálculos siguientes (N_bias)
4. el DSP/robot se enciende los motores y comienza a avanzar. también comienza a calcular la aceleración (N_in-I_bias) * los integrales numéricos y número y la distancia real (N_actual)
5. el DSP compara N_actual a la N_limit en cada nuevo período de muestreo. Si N_actual es alumnas, luego apague los motores y el robot se detiene.
eso es todo.








")




