Paso 4: El Motor





Si no quieres ir a todos los problemas de instalación y calibración de los sensores hall (pasos 5-7), entiendo que al menos algunos motores de unidad de CD/DVD sensores hall integrados.
Proporcionar cierta inercia rotacional en los motores y darles un poco de carga para trabajar contra, puse 5 discos disco duro en el motor, ligeramente pegado juntos y el motor con un poco pegamento (esto hecho el volante de mi proyecto original).
Si vas a quitar el motor de un disco duro, necesitará un destornillador de torx T8 para Desenroscar la carcasa (a menudo hay uno o dos tornillos en el centro que se esconden detrás de una etiqueta adhesiva) así como los tornillos internos que sostienen el motor en su lugar. También necesitará quitar el cabezal lector (un actuador de bobina de voz) para que pueda quitar los discos de memoria para el motor.
Además, necesitarás un motor idéntico, segundo disco duro que te quite el rotor (que tiene un anillo de imanes en su interior). Para separar el motor, agarró el rotor (parte superior) del motor en un tornillo de banco y luego oró en el estator (parte inferior) con dos destornilladores separadas 180 grados. No es tan fácil de sujetar un motor en un vicio bastante apretado sin deformarla. Puede que desee crear un conjunto de bloques en v madera para este propósito.
Perforado y me aburre un agujero en el anillo de imán sobre un torno por lo que encajaría perfectamente en la parte superior del motor. Si no tienes acceso a un torno, puede fijar el rotor invertido a su motor con superglue.
Fotos 2 y 3 a continuación muestran el interior de uno de estos motores que saqué aparte. Interior la mitad superior (el rotor) son 8 polos (imanes que se encajonan en plástico). En la parte inferior la mitad (el estator) hay 12 ranuras (devanados). Cada una de las tres fases del motor tiene 4 ranuras que se conectan en serie.
Algunos motores HD tienen tres contactos en la parte inferior, uno para cada fase y una extra que es el grifo de centro del motor (donde las tres fases). En este proyecto, no hay necesidad para el grifo de centro, pero en el control sin sensores puede venir en práctico (espero publicar un instructable sobre control sensorless uno de estos días). Si el motor tiene cuatro contactos, puede identificar las fases con un ohmímetro. La resistencia entre el centro de toque y es la mitad de la resistencia entre cualquier dos fases una fase.
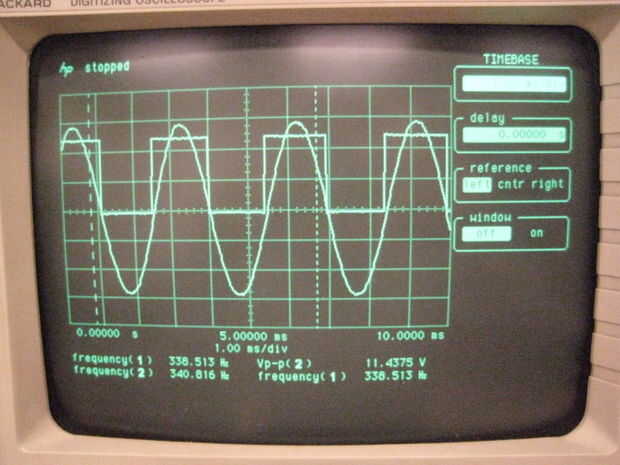
Más literatura en los motores BLDC refiere a aquellos con ondas EMF traseros trapezoidales, pero motores de disco duro parecen tener un back EMF que es sinusoidal (ver foto abajo). Lo puedo decir, funciona bien para conducir un motor sinusoidal con una onda cuadrada PWM, aunque puede haber cierta disminución en la eficiencia.
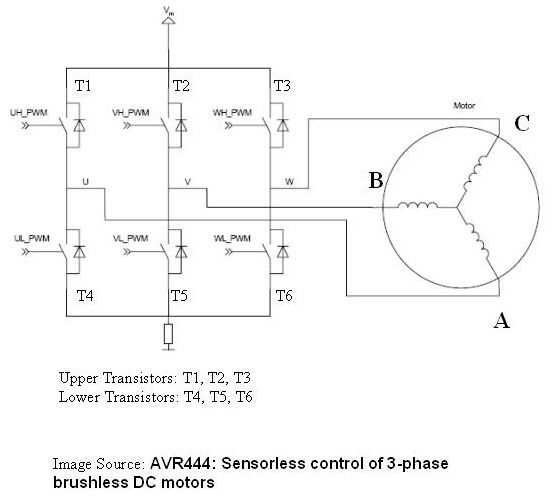
Como con todos los motores BLDC, éste es conducido por un trifásico medio puente de transistores (ver 2ª foto más abajo). Usé un CI hecho por ST Microelectronics (L6234) para el puente, también conocido como el conductor del motor. Las conexiones eléctricas para la L6234 se muestran en el paso 8. La tercera foto de abajo muestra un esquema del conductor del motor y las tres fases del motor.
Para hacer el motor de ejecución hacia la derecha, se haría el siguiente orden de conmutación (primera letra es el transistor superior, en segundo lugar es el más bajo):
Step 1 2 3 4 5 6
Derecha: CB, AB, AC, BC, BA, CA
Manecillas del reloj: AC, BA, CA, CB, AB, AC
Esta secuencia de 6 pasos toma 360 "grados eléctricos", pero, para estos motores, sólo 90 grados físicos. Entonces, la secuencia pasa cuatro veces por revolución del motor. Parecería que estas secuencias son idénticas, pero no lo son, porque, para cada paso en la secuencia de 6 pasos, la corriente a través de las fases es en una sola dirección para CW y en la dirección opuesta para la izquierda.
Se puede ver por sí mismo aplicando un voltaje de una bateria o fuente a cualquier dos fases del motor. Si se aplica voltaje, el motor gire poco a poco en una dirección y luego se detiene. Si podría cambiar rápidamente la tensión en las fases de una de las secuencias anteriores, puede girar el motor manualmente. Los transistores y el microcontrolador hacen todo este cambio muy rápidamente, muchos cientos de veces por segundo cuando el motor está funcionando a alta velocidad.
Además, aviso que si aplicas tensión a dos fases, el motor mueva un poco y luego se detiene. Esto es porque el par va a cero. Usted puede ver esto en la cuarta foto de abajo, que muestra la espalda emf de un par de fases del motor. Es una onda sinusoidal. Cuando la onda atraviesa el eje x, el par suministrado por esa fase es cero. En la secuencia de conmutación de BLDC de seis pasos nunca sucede. El poder cambia a otra combinación de fase antes de que el esfuerzo de torsión en una fase particular baja.
 con Arduino")
")










