Paso 13: Cargar el código y prueba
Si no está utilizando un Arduino - revisar el código a continuación para averiguar lo que está sucediendo. No es ciencia espacial.
Debe tener un regulador del motor de trabajo!
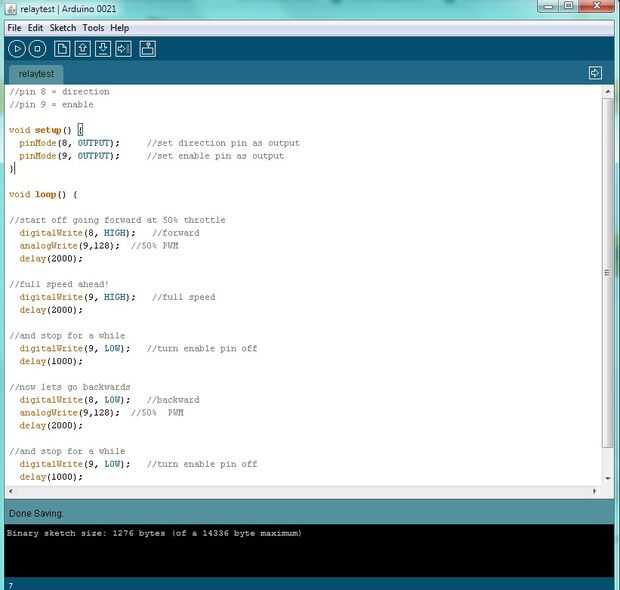
Pin 8 = dirección void setup() {} void loop() {} empezar avanzando a velocidad de 50% toda velocidad! y dejar por un tiempo Ahora vamos al revés y dejar por un tiempo }
PIN 9 = habilitar
pinMode (8, salida); configurar dirección pin como salida
pinMode (9, salida); configurar enable pin como salida
}
digitalWrite (8, HIGH); hacia adelante
analogWrite(9,128); 50% PWM
Delay(2000);
digitalWrite (9, alto); velocidad máxima
Delay(2000);
digitalWrite (9, bajo); desactivar activar pin
Delay(1000);
digitalWrite (8, bajo); hacia atrás
analogWrite(9,128); 50% PWM
Delay(2000);
digitalWrite (9, bajo); desactivar activar pin
Delay(1000);













