Paso 1: R/C Servo Control teoría
Un RC servo es un dispositivo analógico; la entrada es una señal PWM en el nivel de voltaje digital. Este pulso es entre 1.0 y 2.0 ms larga y repite cada ms 20. La longitud del pulso PWM determina la posición de la rueda del servo. Un pulso de 1.0 ms hará que la rueda a 0 grados y un pulso de 2.0 ms hará que la rueda a 90 grados.
Modulación de anchura de pulso (PWM)
Modulación de ancho de pulso (PWM) es una de las técnicas de gran alcance usadas en sistemas de control de hoy. No sólo se emplean en la amplia gama de aplicaciones de control que incluye: control de velocidad, control de potencia, medida y comunicación.
Principio básico de PWM
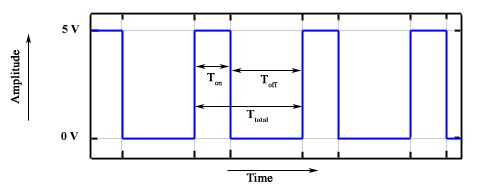
PWM se logra con la ayuda de una onda cuadrada cuyo ciclo de trabajo se cambia para obtener una salida de voltaje variable como resultado un valor promedio de la onda. Una explicación matemática de esto se da a continuación:
Considerar una onda cuadrada que se muestra en la figura anterior. Ton es el tiempo para que la salida es alta y Toff es el momento para que la salida es baja. Ttotal sea período de la onda de tal forma que,
Ciclo de trabajo de una onda cuadrada se define como:
La tensión de salida varía con ciclo de trabajo como:
Así se puede ver en la ecuación final que puede variar directamente la tensión de salida variando el valor de la tonelada.
Si Ton 0, Vout es también 0.
Si Ton es Ttotal Vout es Vin o decir máximo.






")






