Paso 3: Circuito de controlador de Motor
Estos son motores de 12V que pueden elaborar 5A cuando se estancó. Para mover las cargas que quería moverse, dibujan alrededor 1,5 a 2A. Y a pesar de están orientadas hacia abajo, todavía son super rápidos completo 12V, así que decidí hacer a algunos PWM'ing para controlar un poco su velocidad.
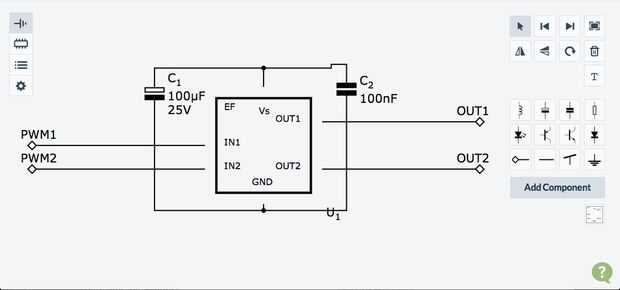
Así, 12V, 2A a 5A, PWM y control bi-direccional... me llevó a este pequeño circuito de driver puente H: TLE-5206. Yo podría ser cortarlo un poco demasiado cerca con la máxima especificación actual continua, pero para esta aplicación, sólo utilizo una 5A fuente de alimentación para ambos motores, por lo que es probablemente fina...
Aquí es cómo manejar el chip.
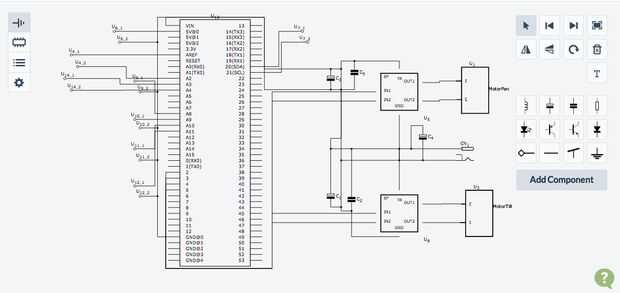
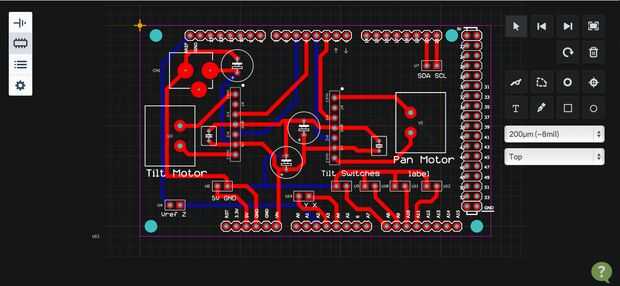
Y aquí está mi circuito para conducir dos de ellas, con final de carrera. La junta fue hecha para un Arduino Mega ADK, porque cuando primero diseñé esto, todavía tenía la esperanza de utilizar la ADK, pero pueden hacerse para cualquier otro tipo de Arduino con 4 pines PWM y 4 pines digitales de entrada.




")








")