


Actualización: 27 de agosto de 2015
Este proyecto ha sido actualizado con las correcciones requeridas para hacer el trabajo de MeArm confiablemente. Estos arreglos constan de
a) utilizando una fuente de 5V 3A y quitando el polifusible de Uno y
b) añadiendo a un espaciador sobre el servo de la base. Más adelante (y) las versiones anteriores de la MeArm no es necesario a este espaciador.
c) agregar una extensión para el cable de servo garra para permitir la rotación completa del brazo.
d) presentar el lado de la pantalla prototipo para limpiar el brazo rotatorio
Un siguiente proyecto cubrirá cómo utilizar su teléfono móvil para programar un trazado arbitrario para el brazo y luego que pase por ese camino.
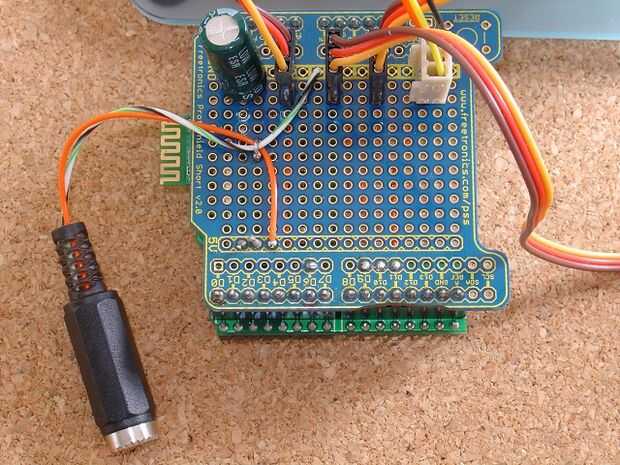
Utilizando una fuente de 5V 3A
Anteriormente el brazo del robot restablecer y soltar la conexión BT intermitentemente. Esto fue porque la fuente USB via el UNO de entrada no puede dar el > 1A actual necesitadas de los servos. Hay un polifusible re-configurable en el Consejo de Uno que está valorado en 1A. Para solucionar esto, el polifusible fue quitado del tablero Uno (ver foto arriba) y un paquete de energía de 5V 3A conectados directamente a Uno 5V, GND pernos encabezado, a través de la placa de prototipo. Para programa de la ONU, es necesario conectar el USB cable y también Conecte la fuente de alimentación. Quitar el polifusible aislados el UNO de la fuente de alimentación USB.
Agregar a un espaciador para el Servo de la Base
Los servos digitales suministrados con el MeArm para un a corto plazo son poderosos y tienden a entrar en oscilación alrededor de la posición ordenada. Esta oscilación es más prononced en el servo de la base. Ese problema fue solucionado en este proyecto mi agregando un espacio plástico personalizado, molido para caber sobre el servo de la base entre la base y el brazo giratorio. La solución recomendada es utilizar servos analógicos, que phenoptix están ya a la venta con la última MeArms. Si usted recibió servos digitales con su MeArm en contacto con phenoptix para sustitución analógica.
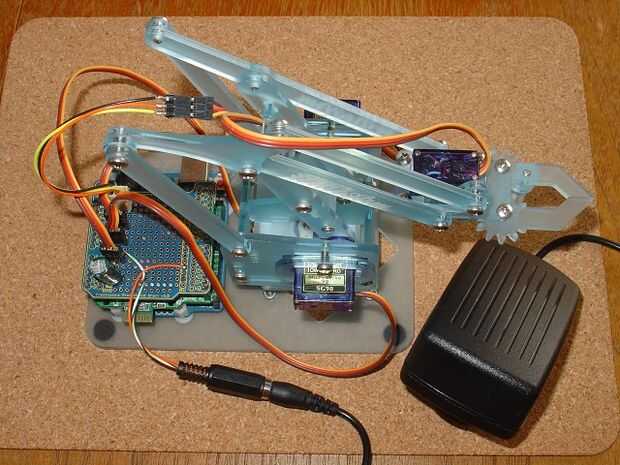
Extensión para cable de Servo garra
Como se muestra en la foto de arriba, el cable de servo garra se amplió con un enchufe y un zócalo para permitir que el brazo gire completamente y extienda completamente. El cable de servo garra fue atado apagado en el brazo en un par de puntos con lineas de pesca para evitar que se enreden como el brazo que se movió en y hacia fuera.
Archivo del lado del escudo de prototipo para el brazo
La foto de arriba muestra la sección de la pantalla prototipo que tenía que presentar para que el brazo puede girar libremente.
Introducción
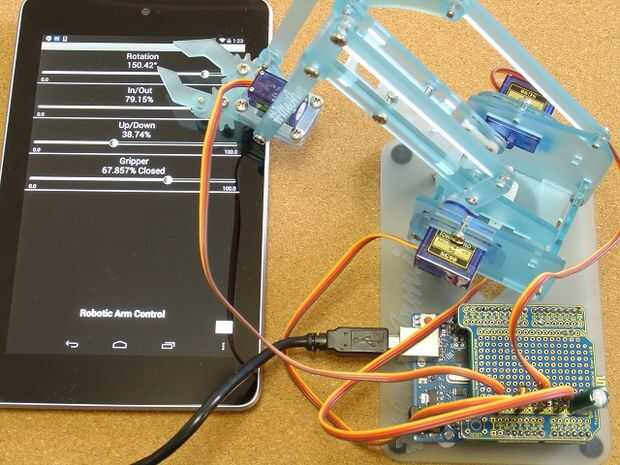
Este proyecto muestra cómo controlar tu MeArm desde tu móvil Android, con pfodApp. Usar cursores en tu móvil puedes controlar cada uno de los cuatro servomotores de rotación, y arriba/abajo, dentro/fuera y pinza de cierre.
Nota: hay un problema con el control de este brazo robótico que se analiza más adelante, con comentarios de phenoptix. – Actualización 27 de agosto, ver correcciones sobre estos problemas.
El bosquejo utilizadas aquí para ejecutarse con pfodApp V1.2.57 + para actualizar su pfodApp si está utilizando una versión anterior.
Estas instrucciones también están en www.pfod.com.au bajo el brazo robótico controlado por control remoto

")

: controlador del brazo robótico juego de Arcade")









