Paso 1: construcción
Esta es la lista de piezas.
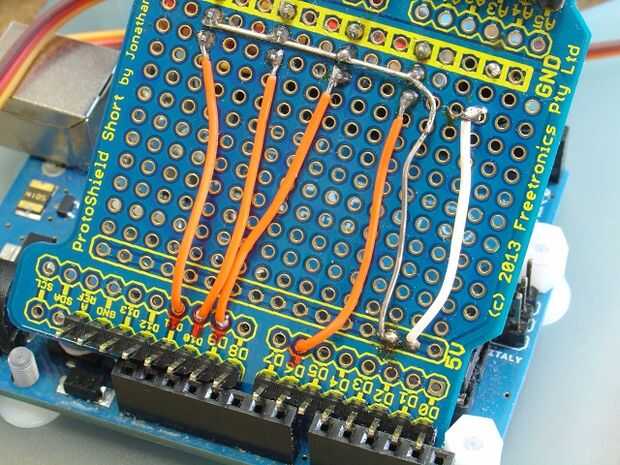
Primer cable a la placa de prototipo como se muestra arriba
En los conectores de servo, el cable marrón es GND y el alambre rojo medio es + 5V y el cable amarillo es el cable de control. Los cables de control están conectados a salidas D6 (rotación), D9 (entrada/salida), D10(up/down), D11(gripper).
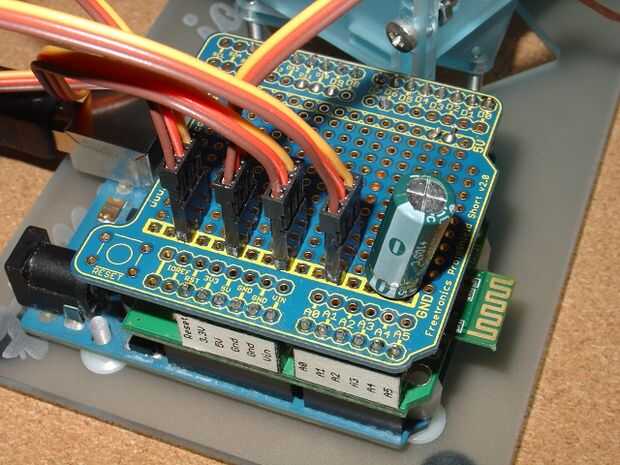
El condensador de 1000uF está conectado a través de los + 5V y GND. La marca - ve está conectada a GND (ver foto arriba) (ver también temas abajo)
Descargar e instalar la biblioteca de pfodParser y luego programar tu Arduino Uno con este bosquejo (RoboticArmRemoteControl.ino). Este bosquejo debe ejecutarse con pfodApp V1.2.57 + para actualizar su pfodApp si está utilizando una versión anterior.
Conecte el protector de bluetooth en la ONU y el tablero de prototipo en la parte superior del enchufe y conectar el USB. Nota: Necesita tener el escudo de bluetooth desconectado mientras que el programa de la ONU o la programación fallará.
Instalar pfodApp en tu móvil Android y configurar una conexión a la pantalla bluetooth como se describe en la guía de pfodAppforAndroidGettingStarted.pdf .
Ahora puede utilizar su móvil en la posición de los servos de 0 a 180 grados como construir el MeArm. El bosquejo tiene limitación de velocidad de serie construido en él, por lo que al mover el deslizador de los servos se mueven lentamente a su nueva posición.
Mi MeArm era V0.4 y he seguido estas instrucciones, Pocket-Sized-Robot-Arm-meArm-V04.pdf. Aunque cuando terminé encontré mi brazo de servo de agarre era 90degs diferente de su imagen, pero funcionaba así que lo dejé. Necesitaba añadir dos de las arandelas de plástico espacial en el acoplamiento de garra para compensar las diferencias de nivel.
La pila de Uno del perno a la placa base MeArm (necesitará algunos extra 3mm tornillos y tuercas para esto, utilicé unos de plástico)...

")

: controlador del brazo robótico juego de Arcade")









