Paso 1: Verificar funcionamiento serial

Este paso supone que correctamente utilizado el mbed para IDE en línea para compilar, descargar y ejecutar código en su placa de Freescale. Si usted aún no lo hayan hecho esto, siga los vínculos en el archivo mbed.htm en la carpeta raíz de tu tabla de K64F o revisar el Instructable sobre el uso de la FreeScale K64F.
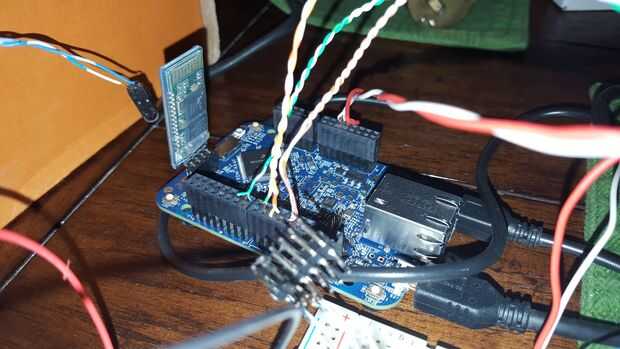
Soldar un encabezado de 4 pines para el módulo de bluetooth a la placa de K64F e instalar el módulo de Bluetooth.
Desde el mbed para IDE, seleccione el programa de frdm_serial modificado por Aaron Birenboim y de importación. Se trata de una modificación significativa del ejemplo frdm_serial entregado. Por razones desconocidas, no he podido conseguir una simple serie:: getc() llamada a trabajar con el módulo Bluetooth. Este ejemplo muestra la interrupción por el método de búfer del anillo que se adopta en el completo programa de control de robot TankDrive .
Cuando el módulo de Bluetooth esté conectado en la cabecera, y la Junta MCU es alimentada por USB de su ordenador, verá una luz intermitente en el módulo de Bluetooth que indica que aún no está conectado a un host de Bluetooth. Comprobar el código en main.cpp para asegurarse de que la velocidad del objeto BT está ajustado a la velocidad en baudios en el módulo de Bluetooth. Generalmente entregan módulos de serial-over-Bljuetooth con la tasa predeterminada de 9600 baudios. Esta tasa se puede aumentar usando un comando AT, como se explica en el instructivo para el módulo Bluetooth HC-05. Tenga en cuenta que no necesita un Arduino para hacerlo. Si tienes un convertidor USB a serie, puede conectarse directamente al módulo de clase HC06 para entrar en los comandos.
Puede conectar al módulo bluetooth con una aplicación Android como BlueTerm.
Abra un programa de terminal serie en tu ordenador para comunicarse con la conexión USB-serial de la K64F. En cromo, puede utilizar una aplicación como beagle, o el monitor serial en el IDE de Arduino, o cualquier otro programa de terminal serie. Asegúrese de ajustar su velocidad en baudios a 115200, o modificar el código de mbed para que coincida con la velocidad deseada.
Usted debe ser capaz de escribir texto en BlueTerm y ver los resultados en su programa de terminal serie de host.
Si va a utilizar la aplicación de coche CXEM desde el control del coche de RC Android sobre Bluetooth Instructable, arrancar. Introduzca la dirección MAC, que debe mostrarse cuando se conecte al módulo Bluetooth de BlueTerm. El modo de control de botón y pulse un botón. Debería ver varios Lxxx y Rxxx comandos aparece en el host terminal si está funcionando la comunicación.



")


 con Arduino y Android(bluetooth)")

")




