Paso 2: Código de importación TankDrive
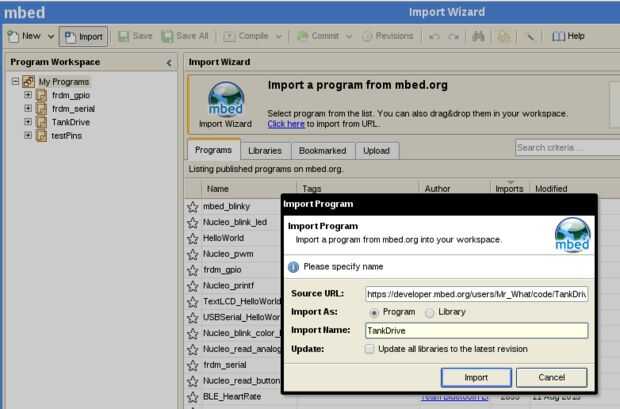
Desde el mbed para IDE, seleccione importar y, a "clic aquí" para importar por URL.
Entrar en https://developer.mbed.org/users/Mr_What/code/Tank... para el programa de TankDrive.
Compilar y descargar la imagen de este código. A reset, el programa debe destellar el conjunto de todos los colores primario primarios y conexión en secuencia. Si ves esta secuencia, se ejecuta el código.
Revisión el código int main() en main.cpp para asegurarse de que Bluetooth la comunicación se establece a su velocidad.
También verifique que usted ha utilizado el mismo pasadores en los constructores MotorDrive globales cerca de la cima de main.cpp. Si ha seleccionado diferentes clavijas, ajustamos adecuadamente sus nombres en los constructores globales para los objetos MotorDrive en el preámbulo de main.cpp.
Muchos módulos de control de motor de potencia mayor, tal anuncio el DAP-1 x serie, tiene un máximo ajuste de PWM. En el caso de la DAP-1A esto es de 98%. No sé por qué. Advierten de quema transistor cuando se ejecuta al 100% ciclo de trabajo. Podría ser que utilizan una bomba de carga para el MOSFET de canal N en la parte alta, y si drena esta bomba de carga, el transistor no puede ser completamente "on", que causaría al calor para arriba. Para estar seguro, yo utilizar pines PWM para dirección entradas el motor conductor y poner una tarifa máxima de PWM del 98% en estas líneas. Controlar velocidad con PWM en el pin EN, pero usando un ciclo de deber del 98% PWM en los pernos de la dirección asegura de que yo meed las recomendaciones para usar el DAP-1 módulo x.
El chip L298N comun no tienen esta limitación. Si está utilizando un módulo L298N, comente la línea #define DBH1 en el preámbulo de main.cpp. El controlador L298N, no necesita pasadores capaces de PWM para las señales IN1/IN2. Pueden ser simples pasadores de capaz de I/O digitales. Podrá también nota que la versión de este controlador de L298N tiene sólo 3 entradas para el constructor, ya que hay no hay salida de corriente-sentido en la mayoría de los módulos L298N.
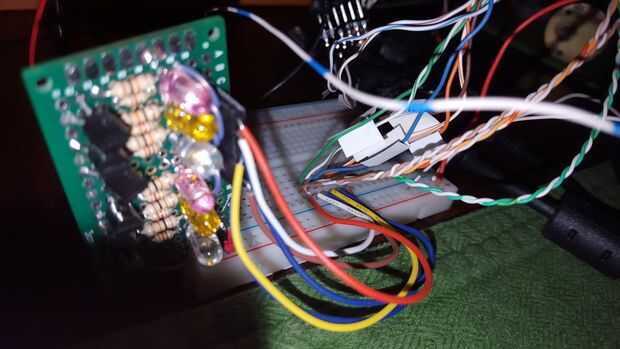
Para la prueba, alambré las señales de control del motor para un arranque en un protoboard. Cada una de estas señales fue atada a una sonda lógica ampliada que ilumina un LED. Me temo que no es capaz de conducir regular 2v, 20mA LED de forma fiable desde una salida de I/O digital de brazo, especialmente cuando se comparten con un TTL de 5v de entrada. La construcción de estos indicadores de lógica amplificados puede ser objeto de un futuro Instructable. Se muestra sobre .3mA extrae el pin I/O digital y esto amplifica con un Darlington NPN para iluminar el LED desde una fuente de 5V. Ya he ordenado una bolsa de 2N7000 pequeña señal MOSFETs para este propósito. Deben podemos cambiar sin necesidad de la resistencia de base limitante de corriente, y casi 0A para conducir la luz. (Una cantidad pequeña de corriente se necesita para cambiar de estado, pero una vez el estado del transistor, la corriente cae nA o menos)
Si no lo hace para construir una prueba breakout, que está muy bien. Ahora que el código es probado, debe ser capaz de probar directamente en motores de corriente continua.



")


 con Arduino y Android(bluetooth)")

")




