Paso 3: Cómo funciona el código
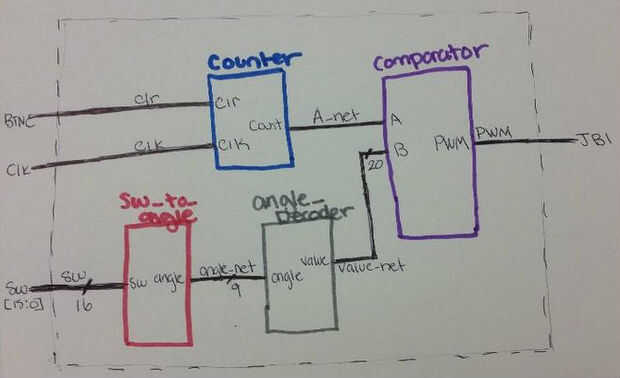
En mi código que tengo mi módulo superior, representado en la imagen por la Plaza de punteado, que entradas de interruptores, un botón para el claro y el reloj del sistema.
En el módulo superior más grande tengo un contador, comparador, interruptor decodificador del ángulo y ángulo al decodificador de valor constante.
El contador toma el reloj del sistema y claro. Cada ciclo de reloj aumenta a un valor de cuenta hasta un cierto valor constante. Este valor es lo que se necesita para obtener la frecuencia correspondiente. Usted puede encontrar la ecuación para que en el código. Una vez que alcanza este valor restablece. Así, cuenta la constante y luego vuelve a cero. Controla la frecuencia.
El interruptor al decodificador de ángulo tiene un valor de interruptor y asigna a un valor de ángulo.
El decodificador de ángulo tiene un valor de ángulo y asigna a un valor constante que el ciclo de trabajo apropiado. Que la ecuación es también comentaron en el código.
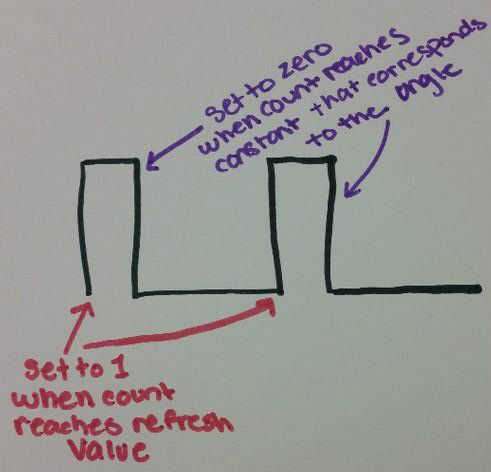
El comparador entonces toma el valor de cuenta y valor constante desde el decodificador de ángulo. Si el valor de count es que menor que la constante de la salida es 1, de lo contrario la salida es cero. Esto crea la señal PWM.
Se puede ver ilustrado en la segunda imagen.
Si desea utilizar el ángulo como una entrada en lugar de los conmutadores puede quitar el interruptor para decodificador del ángulo. Si desea utilizar más de un servo, puede crear varios módulos de controlador de servo en un módulo superior mayor.






")




 y LabVIEW")

