Paso 2: cableado!!
Bien ahora que ya tenemos las piezas, tenemos que montarlos!
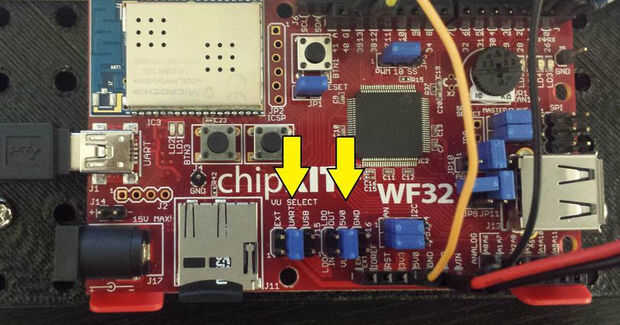
Revisa la foto de arriba para asegurarse de que usted tiene la configuración de puente correcto. Esto asegura que la junta puede hacer salir los 5V necesarios para alimentar los servos micro.
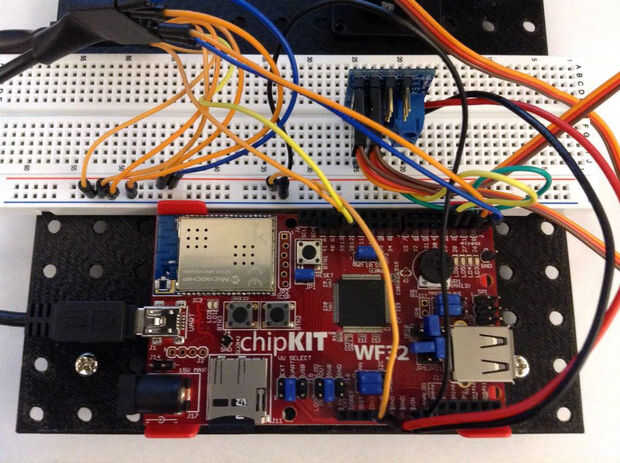
A continuación, vamos a conectar el PmodBT2. De la PmodBT2 referencia manual, podemos ver que el primer pin en el conector J1 es RTS y luego todo el camino al pin 12 las conexiones son: RX, TX, CTS, GND, VCC, estado, ~ RST, NC, NC, GND y VCC otra vez. Desde el WF32 no tiene conexiones CTS y RTS, a atar las clavijas a tierra. A continuación, acople RX y TX según la conexión secundaria de la UART de la WF32 (UART1). En este caso, TX de la WF32 es pin 40 y RX de la WF32 es pin 39. Conecte TX de la WF32 a RX de PmodBT2 y RX de la WF32 a TX de PmodBT2. Indicado diferentemente, conecte el segundo pasador PmodBT2 pin 40 en el WF32 y el tercera en PmodBT2 a pin pin 39 en el WF32.
Conectar el pin 7 en el BT2 al pin 26 en el WF32 y conectar el pin 8 en el BT2 al pin 27 en el WF32. Además, conecte la tierra y 3.3V conexiones a la PmodBT2 (no olvide atar CTS y RTS a tierra).













