Paso 4: En Simulación Proteus

Niple géneros el archivo HEX podremos cargar en la memoria de nuestro microcontrolador virtual y realizar la simulación.
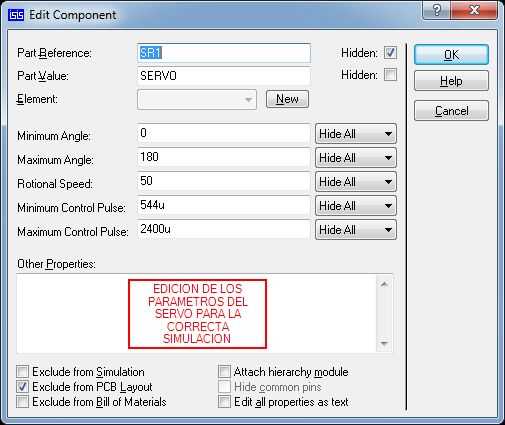
A tener en cuenta para el dispositivo servo de Proteus funcione adecuadamente, hay configurar algunos parámetros:
- Ángulo mínimo: 0
- Ángulo máximo: 180
- Velocidad rotional: 50
- Pulso de Control mínimo: 544u
- Pulso máximo Control: 2400u
Una vez cargado el código y Equation el servo, solo resta presionar la tecla "Play" del simulador, mover de párr de e interactuar con los pulsadores servo de el de en uno u otro sentido.
El archivo "Ejemplo de control de las Naciones Unidas servo.zip" contiene el esquema, el código fuente, el archivo HEX, el proyecto Niple y el proyecto de simulación.



")









