Paso 2: configuración

Conecte la alimentación y tierra a ambos lados de la placa. Colocar el pulsador en la placa y conecte un extremo a los 5V. En el otro lado del interruptor, conecte a tierra a través de un resistor de 10 kilohm. Conecte a este cruce al pin digital 7 en el Arduino.
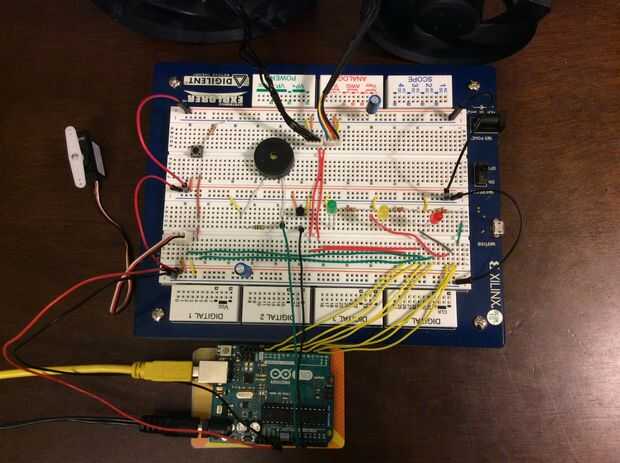
Siguiente paso es adjuntar el piezo, primero conectar los cables del piezo a la protoboard. Conecte un cable y conecte el otro extremo del piezo Analog pin 0(A0). Colocar un resistor de 1 megaohm entre el suelo y el otro cable. Valores más bajos de resistencia hará que el piezo menos sensible a las vibraciones.
Conectar los LEDs, conectar los cátodos (pata corta) a tierra y colocar una resistencia de 220 ohm en serie con los ánodos. A través de sus respectivas resistencias, conecte el LED rojo al pin digital de Arduino 2, el LED amarillo al pin digital 3 y la clavija verde al pin digital 4.
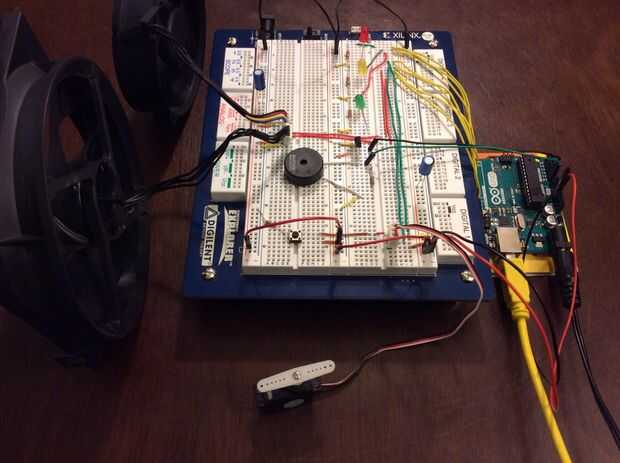
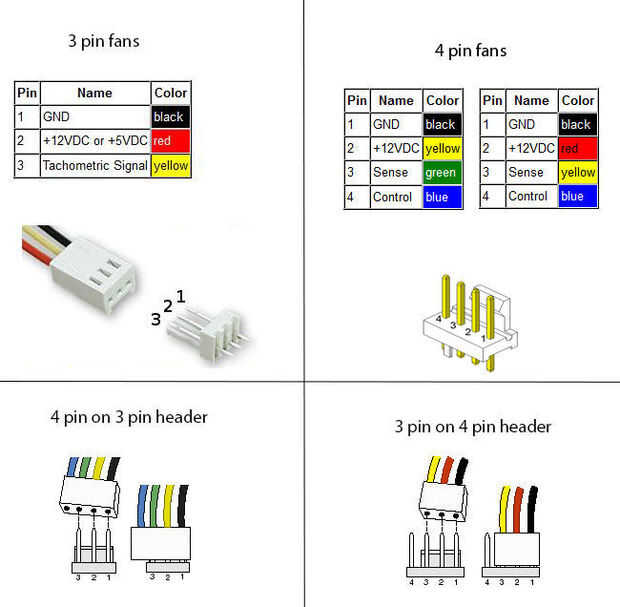
Inserte las cabeceras hombres en las 3 o 4 tomas hembra el motor servo y los fans (véase la figura arriba para instrucciones de pin del ventilador). Para el servo Conecte el cable rojo al poder y el cable negro a tierra. Coloque un condensador electrolítico de 100uF en alimentación y tierra para alisar cualquier irregularidad en el voltaje. Conectar cable de datos del servo pin 9 en su Arduino. Repita este procedimiento para cada uno de los 2 ventiladores que se conecta el cable de datos de uno al pin 10 y el otro al pin 11.
Coloque el TMP26 en la placa con la parte redondeada hacia el Arduino (el orden de los pines es importante!). Conecte el eje izquierdo del piso hacia el lado al poder y el eje derecho a la tierra. Conectar el pasador central con Analog pin 1(A1).













