Paso 2: Construir y probar el protector de Motor
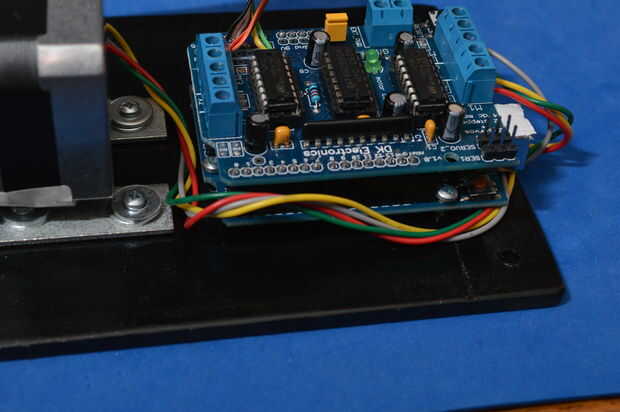
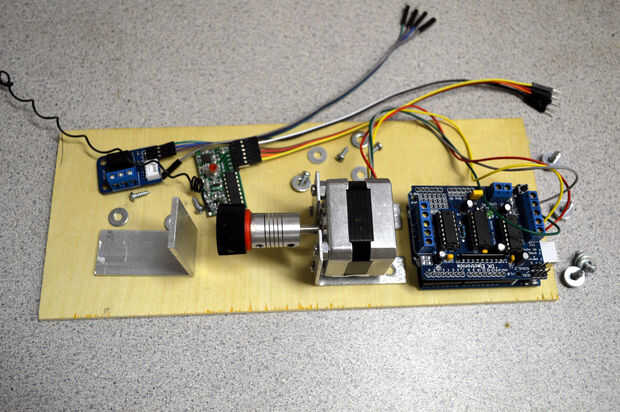
Encontrar el mejor lugar en tu jukebox gabinete para montar el proyecto. En el caso de la SMC1, es en el lado izquierdo del gabinete debajo del amplificador. Reunir materiales para el proyecto. Muchos de los artículos se pueden comprar de Adafruit. Algunos deben fabricarse usted mismo. Otros pueden robaban de la caja de los juguetes rotos y proyectos olvidados. Montar el escudo del motor y prueba. Adafruit tiene una guía paso a paso para el montaje. Examinar todas las juntas de soldadura con una lupa. retocar las junturas de soldadura sospechosa. El prototipo es necesario construir desde algunas sustituciones de componentes pueden ser necesarias. Este es un ejercicio de aprendizaje así como un control remoto. El escudo del motor es capaz de controlar 2 Servos, 4 motores DC, motores paso a paso 2. Sólo tenemos que controlar un motor paso a paso. Conocimiento de las asignaciones de pines es útil para evitar conflictos cuando se conecta a otros dispositivos en el proyecto. El escudo del motor utiliza los siguientes pines de arduino.
Asignaciones de Pin de escudo del motor:
- Paso a paso 11 digital #1
- Digital 3 paso a paso #1
- Paso a paso 5 digital #2
- Paso a paso 6 digital #2
- Cierre de Digital 4,7,8,12 digital
- Servo Digital 9 #1
- Servo Digital 10 #2
- Los pines analógicos abierto
- Digital abierta 2.14-19
Alambre el paso a paso al escudo:
- M1---rojo
- M1---amarillo
- TIERRA---NC
- M2---verde
- M2---Gris/marrón
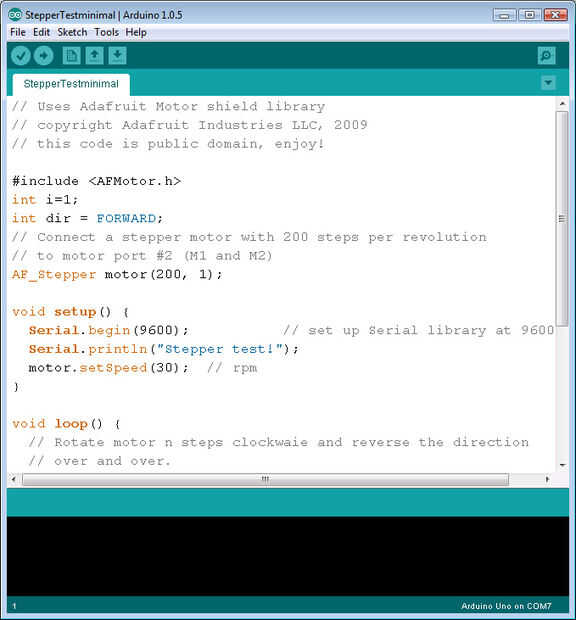
Conectar el arduino con el escudo del motor paso a paso. Descargar e instalar las bibliotecas motor paso a paso de adafruit. He decidido no hacer uso de la biblioteca de AccelStepper. Esto es una sencilla aplicación y no requieren control de movimiento suave. Sólo somos solos el motor de escalonamiento. Se muestra un ejemplo muy básico de rotación de las agujas del reloj entonces contra las agujas del reloj. No hay amortiguación de movimiento es necesario. Descargar los programas de sketch de arduino desde Github jbvolcontrol. Crear un nuevo dibujo en blanco. Cargar el código en el ejemplo siguiente.
//
Ejemplo de funcionamiento del motor paso a paso básico usando la biblioteca de adafruit
#include
int i = 1; int dir = adelante;
Conectar un motor de pasos con 200 pasos por revolución
al puerto de motor #1 (M1)
AF_Stepper motor (200, 1);
void setup() {}
Serial.Begin(9600);
Biblioteca Serial a 9600 bps
Serial.println ("paso a paso prueba!");
motor.setSpeed(30); 10 rpm
}
void loop() {}
Si (i < 200) {}
motor.Step (1, dir, INTERLEAVE); i = i + 1; Delay (100);
} else {i = 1;
DIR =-dir; }
}
Experimentar con tamaños de paso de velocidad diferentes para conseguir un funcionamiento lento y suave del motor paso a paso. Cuidado con el rendimiento del motor cambia con las diferencias en la alimentación. Después de cada prueba Desconecte la forma de arduino al ordenador. Usar la energía del adaptador de CA para ver la diferencia en la velocidad y la torsión. En mi jukebox hay una gran cantidad de resistencia al girar la perilla de control de volumen. El controlador de motor paso a paso se puede funcionar en cuatro modos diferentes para una variedad de perfiles de rendimiento.
- Solo - se energiza una bobina sola en el paso a paso.
- Doble - dos bobinas se energizan
- Interpolación - la energía a los traslapos de las bobinas, esto le da más suavidad en los pasos.
- Microstep - bobinas al lado de uno son rampa arriba y abajo, dando por resultado en micro pasos. Esfuerzo de torsión se baja i este modo.
Al cambiar los modos, el incremento del grado de rotación en el los cambios de motor. Hay física involucrados en la rotación del motor paso a paso. Dependiendo del modo, un paso en un motor de paso de 200 no puede girar el eje de 1/200 de una rotación. Solo camina el motor en modo "Sencillo" dar rotación de 1/200. Un paso de "Intervalo" es más como 1/400 de una rotación. Microstepping aún menos. Tendrá algunos experimentos para obtener el rendimiento deseado. También, tener paciencia. No he encontrado una fórmula que representa para velocidad, modo y paso tamaño de paso. Parece que debería ser una función continua, pero comportamiento determinista se me escapa. Cargar la biblioteca Accelstepper y jugar con movimiento humedecido. Descargar la biblioteca acelerador. Tómese su tiempo y explorar el funcionamiento del motor paso a paso.













