Paso 1: Modo 1: modo de Control de velocidad Digital
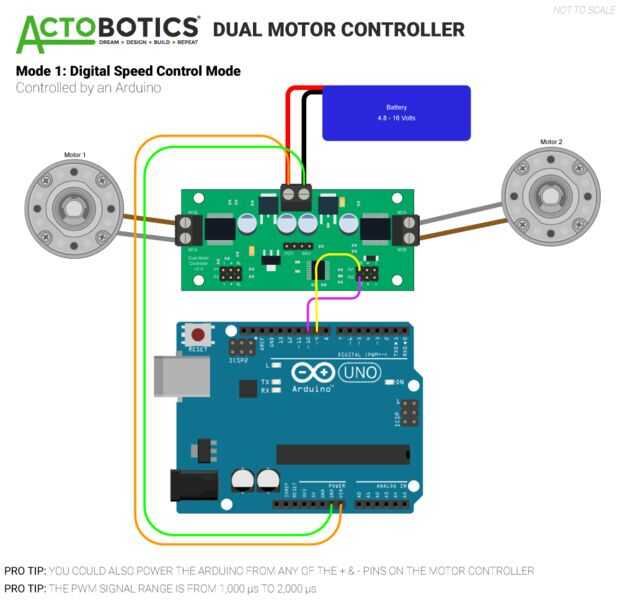
En este modo el DMC va a leer una señal PWM (modulación de anchura de pulso) que escucha en los alfileres de IN1 y IN2. Utiliza el ancho de los pulsos para determinar la velocidad y dirección de cada motor (1 S para el Motor 1, S IN2 para Motor 2). El DMC muy alta resolución, puede detectar cambios en el ancho de pulso poco como 1/3 de un microsegundo. Por supuesto si usted está usando una fuente que, por ejemplo, solo cambia 2 microsegundos en un momento, será el factor limitante en la resolución.
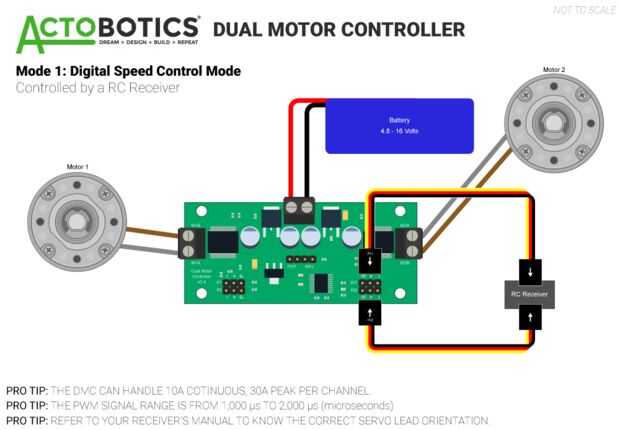
De un transmisor/receptor RC
Simplemente conecte el receptor en el DMC, como se muestra en el diagrama y usted es buenos ir. La gama PWM en que DMC está preparado para funcionar debe trabajar bien con transmisores/receptores más estándares.
De un Arduino
Una fuente de una señal PWM es un microcontrolador como un Arduino Uno. Abajo se encuentra un código de ejemplo. Esencialmente usted necesitará controlarlo como si se controla un servo. Una cosa que siempre me gusta hacer cuando controlando un servo con un Arduino es definir el rango PWM al objeto de fijar el servo (ver líneas 23 y 24 abajo) y esto no es una excepción.




")








