Paso 4: Modo 4: posición de Control modo (Servo)
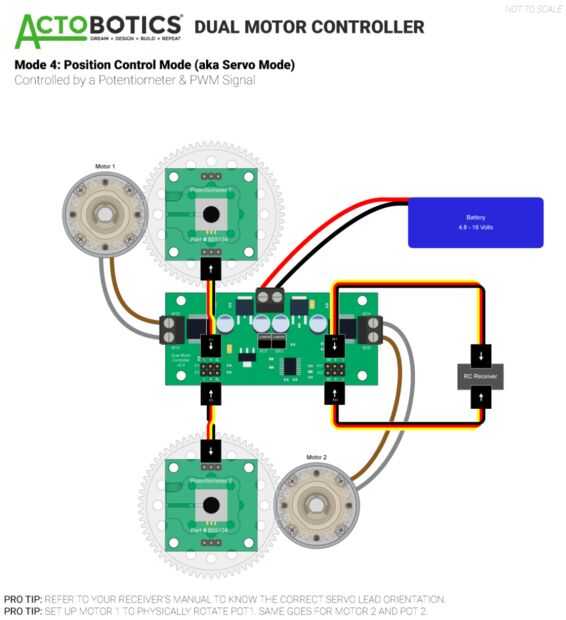
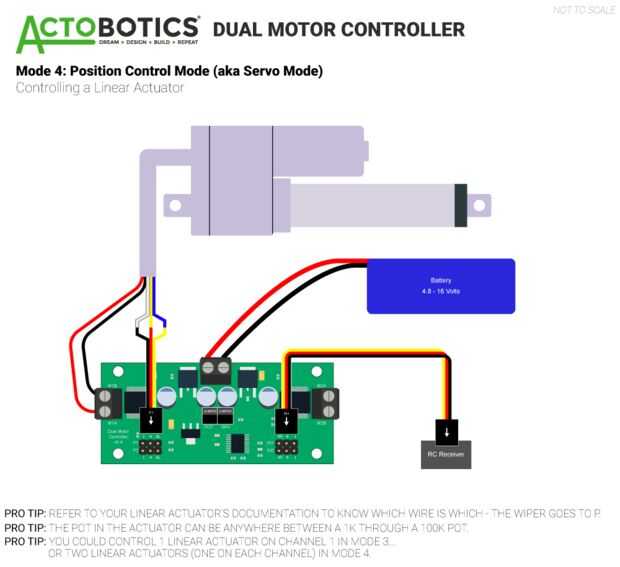
Modo de Control de posición hará que los motores actúan como servos. Eso es correcto puede utilizar esto para hacer tu propio super potente servo grande! Al igual que en un servo normal se necesitaría tener un potenciómetro que está físicamente relacionado con el eje del motor. El DMC utiliza esto como referencia para saber dónde está en un momento dado el motor. Y al igual que un servo tendrá una señal PWM para determinar donde debe ser. Si es no donde debe estar, que impulsará el motor hasta que esté.
Cabe destacar que antes de vincular físicamente el bote a motor, necesita para asegurarse de que se gire en la dirección correcta. Hay diferentes maneras que podría suss esto pero sugiero sosteniendo cerca de donde usted sería montarlo en la misma orientación y el poder en el sistema. Cuando el comienzo del motor gira, girar manualmente el bote con la mano en la dirección del motor girando lo. Si puede llevar el motor a una parada haciendo esto has engañado en el pensamiento de que ha encontrado la posición que está buscando y eso significa que está conectado correctamente. Si el motor no se detiene después puede invertir la polaridad de los cables del motor o puede invertir la polaridad de la + y - los cables que se conectan a la olla. De cualquier manera te llevará en la dirección correcta.




")








