Paso 9: Ajuste Final
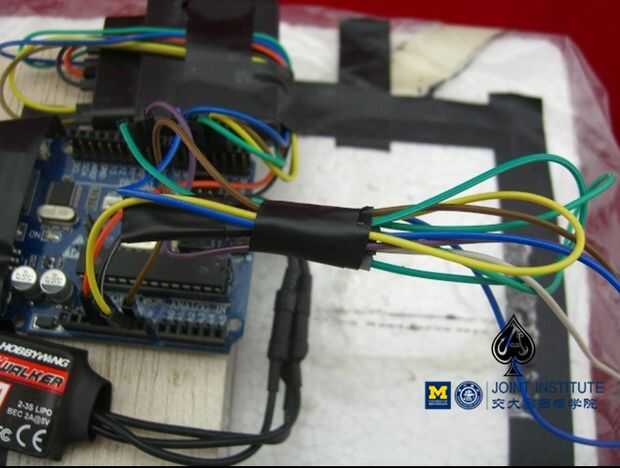
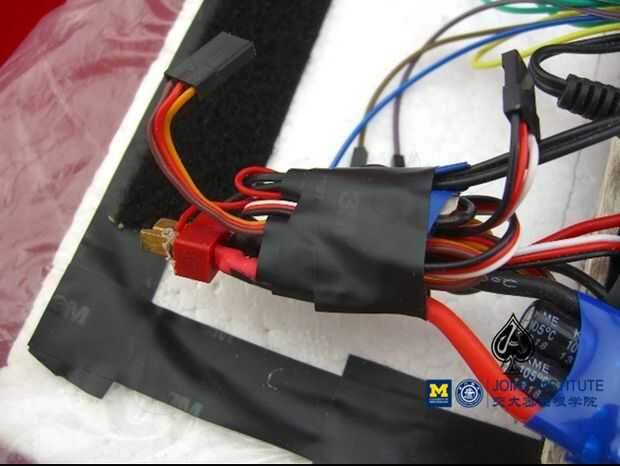

Fije el Arduino, el dos ESC y el receptor de controlador en el tablero superior de la nave con cinta. Cubrir las conjunciones de cabecera de pin con cinta aislante. Fijar cables en manojo con cinta.
Paquete de dos baterías con cinta adhesiva. Coloque el Velcro debajo de la batería y en la cola de la nave. Ajustar la potencia de elevación en el programa para eliminar la uno mismo-rotación. Ajuste la posición de equilibrio del volante motor en el programa hasta que la cola de la hélice del punto al centro de la nave. Ajustar la posición de fijación del grupo de la batería (con Velcro) hasta cuando propulsa la nave, la nave irá en línea recta.











")

