
INTRODUCCIÓN
En este proyecto, usar dos transceptores Pololu Wixel para controlar remotamente un robot Arduino desde un PC que ejecuta un software emulador de terminal donde utilizar el teclado al robot Arduino, vía conexión inalámbrica, qué dirección mover (f =, b = atrás, l = izquierda, r = derecha, s = stop).
Este es uno de los robots más simples que tenía que poner juntos. Sobre todo porque yo estoy reutilizando mi robot pasado partes y código del proyecto y no en pequeña medida debido a la simplicidad de la Wixel inalámbrica solución.
ACERCA DE TRANSCEPTORES WIXEL
Transceptores de Wixel de Pololu son baratas y fáciles de implementar. Compré dos para alrededor $40 más gastos de envío. Los transceptores disponen de todas las aplicaciones necesarias para convertirlo en un puerto serie inalámbrico. El vendedor hace un gran trabajo con la documentación de la configuración de la Wixels pero en Resumen esto es lo que está involucrado en la creación un Wixel:
--Conecte cada Wixel en el PC mediante mini-USB
--Instale controladores de Windows y la utilidad de configuración del proveedor.
--Usando la utilidad de configuración de Wixel carga el applet proveedor proporcionado llamado Wixel Wireless Serial aplicación. Asegurarse de que la Wixels y Arduino tiene la misma velocidad en baudios.
Una vez que haya realizado los pasos anteriores para cada Wixel, les puede desconectar la PC y conservan su código, al igual que el Arduino. Ahora tiene dos Wixels que se comunican entre sí como dos puertos com serie.
La forma más sencilla de probar si tus Wixels se comunican uno con el otro es conectar cada uno a un PC separado con un emulador de terminal como TeraTerm. Puertos serie de emuladores de terminal y parámetros a los de la Wixel adjunto y empezar a escribir en el teclado. Usted verá lo que escrito en la pantalla de emulador de terminal de la PC. Es así de simple.
La única pega de la Wixel es el de corto alcance. La documentación del vendedor dice que es de aproximadamente 60 pies. Pero la simplicidad de implementación compensa la corta distancia. Si todo lo que necesitas es funcionalidad inalámbrica en interiores y facilidad de uso, Wixel es una buena opción.
No, este proyecto no está patrocinado por chip... bla bla bla. Estoy simplemente impresionado por este gizmo bien empaquetado.
PIEZAS DEL HARDWARE
--Wixel transceptores X 2. Si no estás en soldadura te puede conseguir el Wixels con cabeceras listos para enchufar la placa: http://www.pololu.com/catalog/product/1336
-Arduino Uno: http://store.arduino.cc/ww/index.php?main_page=product_info&cPath=11_12&products_id=195
--Escudo de prototipos Arduino (opcional)
--Micro Servos X 2. Usé el Turingy TG9e que he modificado para rotación continua. Usted puede comprar servos ya modificados para rotación continua. Si ya tienes 2 servos y desea modificar para rotación continua, hay un montón de tutoriales si usted busca en la web. Usé servos en lugar de motores de corriente continua para controlar el robot porque servos pueden ser controlados y alimentados desde un Arduino sin las complicaciones de un puente h que se necesita para alimentar y controlar motores de corriente continua.
--AA X 6 pilas
--Breadboards y cables.
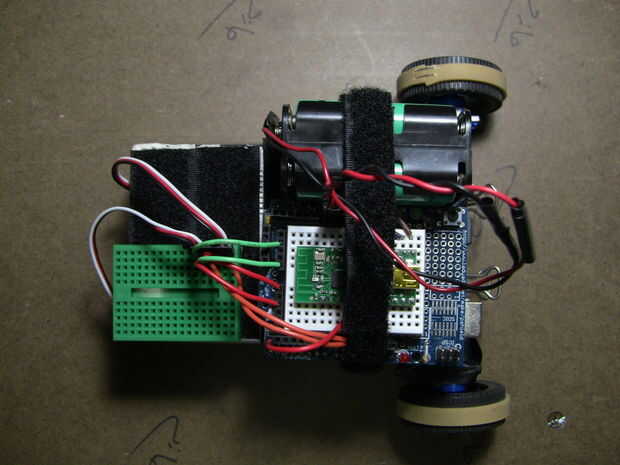
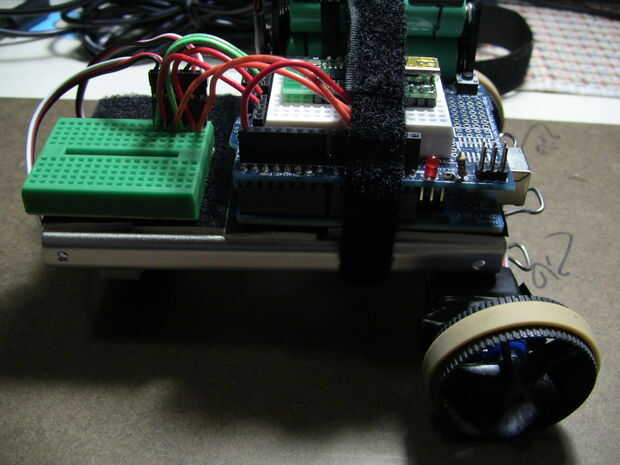
--La plataforma de robot es un vacío 3.5 USB disco externo caso cubierto con Velcro para facilitar la facilidad de ajuste y retiro de piezas de robot. No soy un gran fan de los accesorios permanentes. Las ruedas del robot fueron tomadas de un coche de juguete y se conectan entre sí vía mecánica construcción set piezas y cintas y clips de papel. Se refieren a mi proyecto de robot anterior sobre cómo estaba montada esta plataforma:
DESCARGAS DE SOFTWARE
IDE de Arduino 1.0 para Windows
http://www.Arduino.CC/en/Main/software
Wixel Windows controladores y el Software (versión 110705)
http://www.Pololu.com/catalog/Product/1337/Resources
Aplicación serie wixel Wireless
http://www.Pololu.com/docs/0J46/9.b
Emulador de Terminal TeraTerm (shareware)
http://HP.Vector.co.jp/authors/VA002416/TeraTerm.html
INSTRUCCIONES DE CABLEADO
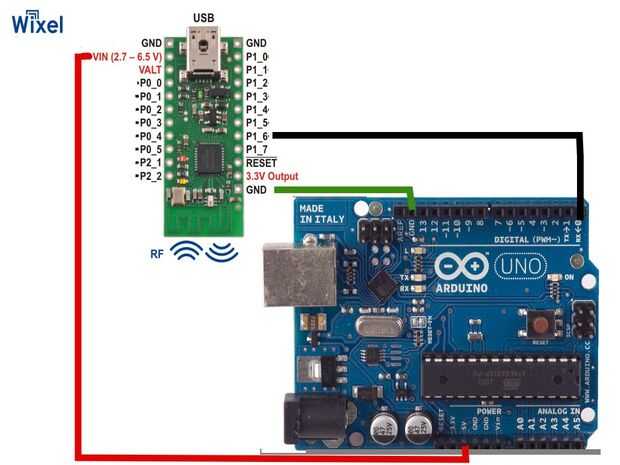
WIXEL Y CABLEADO DE ARDUINO:
Pin GND Wixel---> pin Arduino GND
Pin de VIN wixel---> pin de 5V de Arduino
Pin de TX wixel P1_6---> Pin Digital de Arduino 0 (RX)
WIXEL EN PC (ANC DE MANDO):
Wixel en el PC debe estar conectada a través de un mini-USB. Eso es todo.
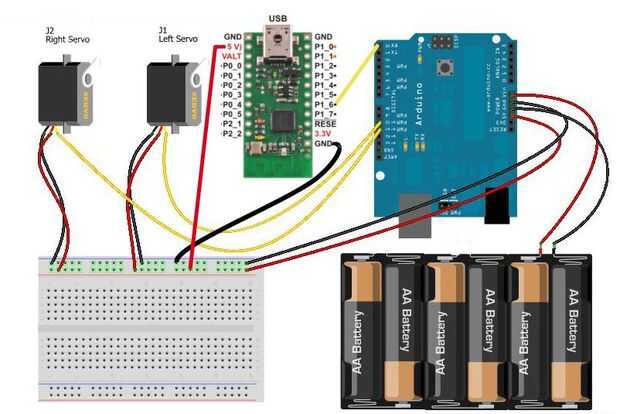
CABLES SERVO:
Servo izquierdo - señal (cable amarillo en mi servo)---> 10 de Pin Digital de Arduino
Izquierda de servo - GND (negro cable mi servo)---> pin Arduino GND
Izquierda de servo - VIN (cable rojo en mi servo)---> pin de 5V de Arduino
Derecho de servo - señal (cable amarillo en mi servo)---> Arduino Digital Pin 11
Servo derecho - GND (negro cable mi servo)---> pin Arduino GND
Servo derecho - VIN (cable rojo en mi servo)---> pin de 5V de Arduino
BATERÍAS:
Cable de batería rojo (+)---> pin Arduino VIN
Cable negro de la batería (-)---> pin Arduino GND
CÓDIGO DE ARDUINO
Ver archivo adjunto "wixelrobot.ino"
COMENTARIOS
Como siempre, tu feedback es muy apreciada.
ENLACES
Encontré esta guía sea útil para aprender más sobre Wixel:







.")



")

