Paso 7: Programación del control remoto:



Utilizando todo el aprendizaje previo de cada módulo sólo necesita adaptar los programas a las características del control remoto mediante la vinculación de dos programas: uno para el mando de arduino funciona como un transmisor y otro programa para arduino hexápodo funciona como un receptor.
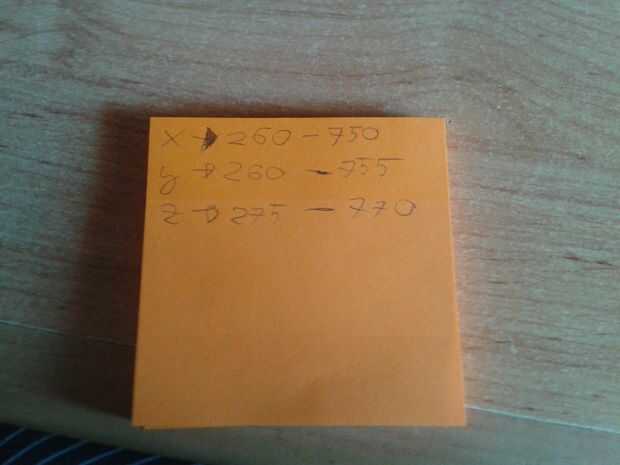
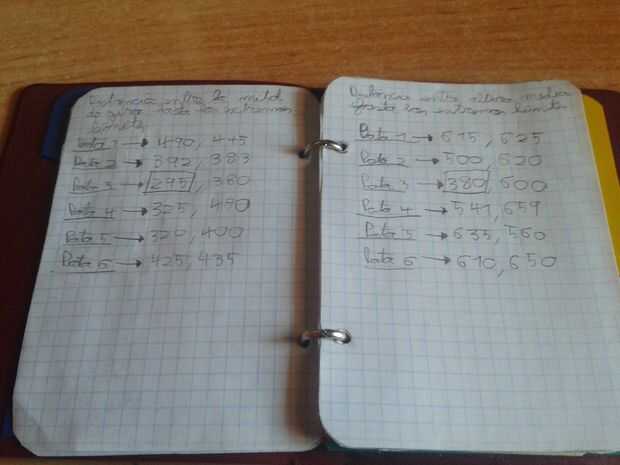
Según los límites de movimiento de los servos, que recibí de mi anterior instructable, debe utilizar el mapa comando arduino para convertir los valores de los potenciómetros y el acelerómetro dentro de los valores del rango de límite mínimo del movimiento de los servos. Ser como sigue:
Utilizando uno de los botones en uno de los joysticks que quería utilizar el ejemplo que se muestra en la página de arduino que consiste en contar el número de veces que se presiona un botón para crear modos en que se moverá el hexápodo.
http://Arduino.CC/en/Tutorial/ButtonStateChange
I convertir este ejemplo y adaptar mis bocetos del mando y el receptor. Por lo tanto
Así que crear tres modos de movimientos:
- La primera permite que el potenciómetro lineal y palancas de mando mover el hexápodo
- El segundo permite joysticks, el potenciómetro y acelerómetro mover el hexápodo
- Y el último modo de mover el hexápodo paseo, caminar hacia atrás, etc. Si desplaza el joystick dos simultáneamente



![Control remoto de 2 canales sin IC [bueno para helicópteros!]](https://foto.askix.com/thumb/170x110/2/bf/2bf78721622eb49c1924bf372dc2a9ad.jpg "Control remoto de 2 canales sin IC [bueno para helicópteros!]")









