Paso 9: A la bestia de la vida: instalar la electrónica...
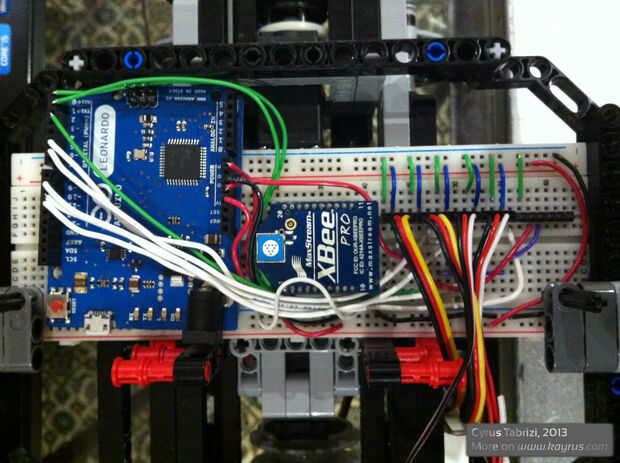
Conseguir un protoboard de su elección y conectar todos los pines de los servos para cada pin es por sí mismo y no está conectado a nada (ver las fotos que he conectado si no tienes idea lo que estoy diciendo). Conectar todas las clavijas rojizas de los servos a la red principal en el lado de su tablero, esto es la línea positiva y se conectará al borne positivo de la batería te. Hacen lo mismo con las patas negras, pero conectar al negro principal en su lugar, que es tierra. El tercer pin de servo (mina son de color blanco y amarillo) es el pin de entrada. Esta tercera clavija debe conectarse a uno de sus pines de salida digital PWM en el Arduino.
Ahora necesita tu radio XBEE y la Junta de rotura. Conecte con cuidado estos juntos empujando suavemente el extremo delantero de la radio en un poco y luego la parte de atrás un poco. Mantenga alternando, empujar sólo un poco a la vez. Esto evitará giros poco oro de la radio de doblez o rotura (son más frágiles que algo como sus pernos del servo). Conecte la Junta en el protoboard. Para saber que pines necesita para conectarse hay que buscar en la superficie de la radio o el breakout Junta. La radio XBEE debe tener un 1 y un 20 en un extremo, y el resto es numerado del 1 al 20 en sentido antihorario. Los pasadores sólo necesitamos son VCC, duda, DIN y GND, estos son los pines 1, 2, 3 y 10, respectivamente. VCC y GND son para alimentar la radio; DUDA y DIN son los pernos utilizados para recibir y enviar señales a través de la radio (duda es lo que la radio está recibiendo, y DIN es lo que desea enviar a través de él).
El perno de tierra debe conectarse al suelo mismo como todo lo demás. El VCC o VIN (voltaje en), aunque, debe no conectarse a los pines positivo mismo que todo está conectado, porque el XBEE funciona con 3.3 voltios y nada más. Por suerte, la mayoría de microcontroladores tienen un pin de 3,3 fuente disponible así que conecte el pin VCC para que. Si no te necesitará conseguir un regulador de voltaje que puede fuente de 3.3 voltios. Las duda y DIN pins deben conectarse a los pines RX y TX (pines 0 y 1 respectivamente). Los pines RX y TX son lo que utiliza Arduino para comunicación serial, que son la recepción y transmisión pernos, respectivamente, tal duda debe ser conectado al RXy DIN a TX.
Ahora es el momento para conectar las pilas. Esta parte es un equilibrio de actuar (a menos que tengas los reguladores de voltaje de repuesto), porque el Arduino y Servos operan a diferentes voltajes. Arduino puede ser alimentado con tensiones entre 7 y 12 V (ésos son los valores recomendados) y tiene un regulador integrado de 5V que pueden aprovechar (y un 3.3 V que el XBEE es escurr). Los servos se deben funcionar con tensiones entre 4.8 y 6 V. Encontré que 4.8 o 5V no proporcionan el rendimiento que yo quería, así que necesitaba una forma de energía en 6V — no bajo y no alto. La cuestión es la siguiente: si quiero usar pilas AA, las salidas teóricas puedo conseguir son 4.5, 6, 7.5, 9 etc. (incrementos de 1, 5V). Si la fuente de alimentación principal funciona a 6V, puedo energía los servos directamente de las baterías, pero esto es bajo el mínimo recomendado 7V de Arduino. Si corro todo de 7,5 voltios, se recalienta los servos, pero proporcionará el Arduino con suficiente energía. El truco, sin embargo, es que los 1.5V incrementos son la tensión teórica de una batería AA adicional. En realidad, se ejecutará ni una nueva batería de AA 1,5 V (y los recargables que ciertamente tampoco), así que debo estar esperando tensiones inferior a 6 y 7.5. El problema es que como llego a 6V, yo también estoy más cercano a 5V, esto es un riesgo para el Arduino, que funciona con 5V. Si no tiene suficiente voltaje para regular a 5V, reiniciar o apagar. Si yo estuviera alimentando el Arduino con pilas y las baterías no se conecta a cualquier otra cosa, probablemente podría conseguir lejos con corriente en 6V. Sin embargo, puesto que estoy corriendo los servos de las baterías de la misma, cualquier caída de tensión causada por los servos (que pueden ser causados por estancamiento) haría que la fuente "6V" a bajar a niveles posiblemente debajo de 5V. Idealmente, los reguladores de voltaje se utilizaría con una fuente de 9V para alimentar los servos y Arduino independientemente, pero también he tenido éxito escurr las baterías recargables 5, que, combinadas, proporcionan entre 6 y 7.5V.
Sólo traté utilizando diferentes combinaciones de pilas AA. Para conectarlos, probablemente necesitará un soporte de la batería de algún tipo. Mina era una caja de batería de funciones de energía de Lego y podía aguantar hasta 6 baterías. Puesto que sólo quería 5 baterías, sin embargo, y no quería modificar la caja de la batería, decidí hacer una falsa batería de papel de aluminio, una pieza de Lego y algunos tejidos o toalla de papel. Rasgar un pedazo de papel, envolver un haz de Lego Technic de 5 de largo con él para darle una bonita forma redonda y luego envolver con papel de aluminio. Esto debe ser lo suficientemente largos para conectar los terminales de una batería AA conectarse normalmente.
Ahora viene la parte más cruel de todos: modificar una pieza de Lego. Pensé largo y tendido acerca de alternativas, pero, al final, sólo tenía que hacer. El compartimiento para pilas, para Legos, tiene una conexión de alambre de Lego para conectar motores y otros dispositivos de Lego. Para utilizar esta conexión para alimentar nuestro coche RC, sin embargo, sólo queremos un positivo y un cable negativo. Esto significa que usted tendrá que cortar un alambre de funciones de energía de Lego en mitad y tira de los cables en la parte exterior hacia abajo por lo que se puede soldar un cable de núcleo sólido utilizable que (en mi defensa, mantuvo ambas mitades para que yo pude volverlos a montar juntos una vez que este proyecto se terminó...). Desde la caja de baterías dispone de un interruptor de polaridad incorporada, no necesariamente sabrá cual cable es positivo y cual cable es negativo, tendrás que elegir una dirección, prueba con un voltímetro y conectarlo a la placa adecuadamente. Hacerlo con precaución, porque no quieres freír todos sus componentes! No hay presión.
Lo conecté la batería fue: conectar conexión positiva de la batería a la misma línea que todos los servos están conectados; Conecte la conexión negativa de la batería al conector de tierra de Arduino y ejecutar un cable de conexión positiva de la batería a través de la placa al pin de VIN en el Arduino (este es el pin de fuente de voltaje que alimenta el regulador de voltaje incorporado). Esta manera, se comparten todos los motivos, que debe ser para que todo funcione.
")








 utilizando un Arduino")



