Paso 1: Cirugía de cerebro juguete



En primer lugar, tira el coche R/C que tenes de la tienda, de todas sus tripas electrónicas. Esto incluye el controlador de motor, cristal de R/C, y cualquier otros PCB instalado. Sólo necesitamos dos cables de cada motor y un conjunto de cables en el compartimento de la batería. El código para este proyecto está pensado para uso con un robot de tipo "tanque-steer", utilizando un motor a cada lado del robot, como un tanque. Con bi-direccional control de cada motor, podemos girar el robot en un círculo sin avanzar o inversa (llamado un "radio de giro cero"). Este tipo de control es muy efectivo, especialmente en velocidades mas lentas.
Nota: No tienes que haber encontrar un vehículo de juguete con las pistas del tanque, hay muchos juguetes de RC en la tienda que tienen ruedas, pero utilizar tanque de dirección - sólo asegúrese de que su vehículo tiene un motor instalado a cada lado. Pude encontrar varios vehículos tanque-volante "orugas" en mi tienda local, con visitas regulares y unos meses de tiempo.
Una vez que eliminas los viejos circuitos electrónicos del juguete, necesitamos un lugar para montar la placa Arduino, el PCB controlador de motor y el pequeño adaptador de Bluetooth (usaremos el compartimento integrado en el juguete). Si utilizas un Ardumoto escudo para Arduino, sólo necesita un lugar para montar el Arduino. Utilicé una pistola de pegamento caliente para agregar una pequeña gota de pegamento en la parte superior de la base de juguete - y luego montar el Arduino. Usando pegamento de baja temperatura mantener el Arduino conectado bien, pero también permite quitar más tarde sin daño si lo desea.
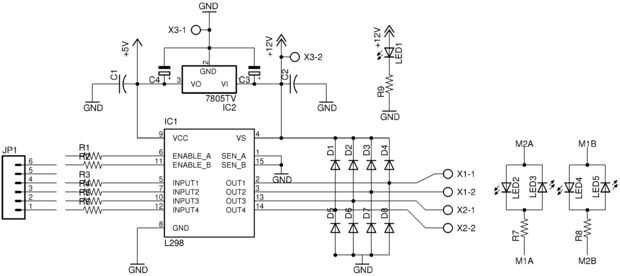
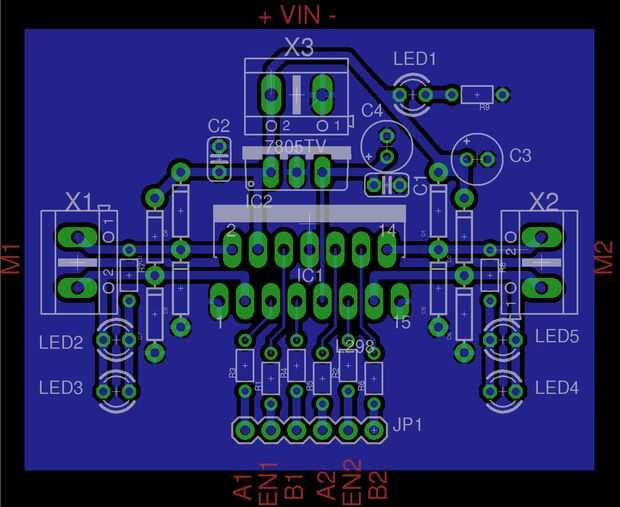
Diseñé un pequeño PCB que utiliza un controlador de motor dual L298N IC para control de motores (2) en cualquier dirección y con control de velocidad completo. Los archivos PCB fueron creados utilizando la versión gratuita de Eagle CAD y pueden utilizarse para construir su propio controlador de motor. Si no como construir tu propios PCB, puede comprar el motor Ardumoto-controlador de Sparkfun.com que utiliza una versión de montaje en superficie de la misma IC L298N (reasignación de pin de control puede ser necesario en el código).
Descargar los archivos de Eagle para el controlador de motor L298N y código para este proyecto aquí:
https://sites.Google.com/site/arduinorobotics/Arduino-Robotics/free_project













