Paso 2: Cableado de conexiones
![]()
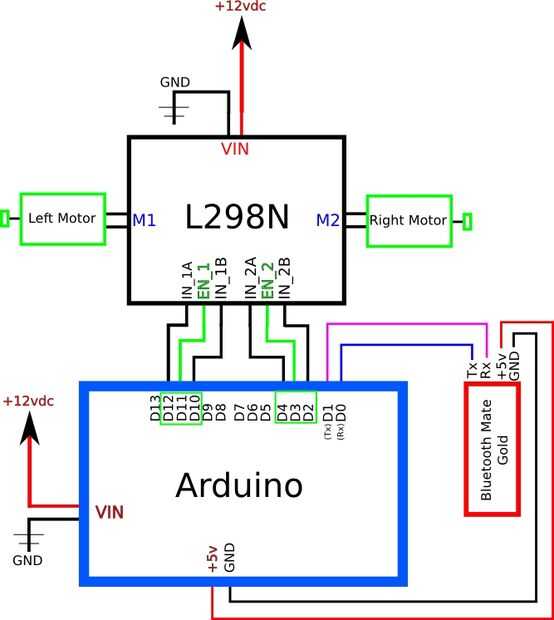
Para obtener un funcionamiento del robot mediante Bluetooth, hay muy pocas conexiones. (3) cables para el control de cada motor de la Arduino a controlador de motor, (2) cables para el adaptador de Bluetooth serial al Arduino, los cables del motor (4) y unos cables. Utiliza pines macho para hacer cables de conexión de la Arduino a la PCB del controlador de motor (ambos utiliza conectores hembra). Si usas el escudo de Sparkfun Ardumoto, no necesita cablear el controlador del motor a la Arduino, sólo el adaptador de Bluetooth y poder.
El conductor del motor L298N IC utiliza 3 entradas para cada motor (entrada A, entrada B y Enable) para determinar la velocidad y dirección. Control de velocidad se logra más fácilmente por las entradas A y B para determinar la dirección y el pin Enable para aplicar la señal de control de velocidad PWM.
Consulte el diagrama de cableado suministrado para conexiones específicas.