Paso 6: PWM regulación
Habiendo tenido tiempo para probar estos drivers, yo quería añadir mis observaciones sobre PWM amortiguar este controlador LED. Hay muchas soluciones diferentes para PWM que amortigua. Arduinos tienen un número de pines capaces de PWM de 8 bits, y 555 temporizadores permiten circuitos PWM fáciles y baratos. Otra solución que tenía la intención de utilizar con estos drivers son el TLC5940. Tiene 16 canales capaces de resolución PWM de 12 bits.
Arduino
Arduinos PWM de 8 bits es una forma sencilla de regulación de estos controladores. Conectar el conector de tierra de Arduino y un pin PWM a los tableros de driver es todo lo que se necesita! La clave de esta simplicidad es los pernos Arduinos, que son capaces de hundirse y de abastecimiento actual.
TLC5940
En algunas situaciones, uno puede tener una mayor resolución. PWM de 8 bits puede conducir a muy notables 'pasos' entre valores adyacentes de PWM. Esto es especialmente evidente en valores bajos (cerca apagado).
El TLC5940 proporciona resolución de 12 bits, que es 16 veces mayor que los Arduinos 8 bits! (4096 vs 256)
La configuración de hardware y software para controlar el TLC5940 con un Arduino puede encontrarse aquí
Lo más importante sobre el TLC5940 es que los pines de salida pueden sólo disipador de corriente. El TLC5940 realmente es diseñado para ser un conductor del LED sí, pero sólo hasta 120mA para todos los canales combinados. Para conectar nuestras tarjetas de controlador de LED, tenemos que añadir un circuito entre el TLC5940 y la Junta.
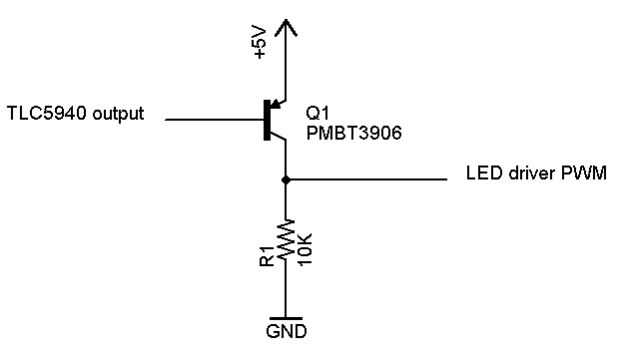
Nota: se menciona en este instructable que para conectar un TLC5940 para estas tarjetas, una 10k resistencia de pullup debe agregarse a la Junta en el espacio proporcionado. Sin embargo, esto es un error. Si bien puede ser un circuito que funciona usando una resistencia de pullup, el método que describo a continuación utiliza una resistencia de pulldown 10 k en su lugar.
Para obtener la señal PWM adecuada, es necesario un transistor bjt PNP. Usé un 2n3906. Porque el TLC5940 tiene actuales pins que se hunde, no puede proporcionar la corriente necesaria para activar un transistor de NPN bjt. En su lugar, usamos un transistor bjt PNP, para que el TLC5940 puede fuente actual de la base del transistor. Básicamente, cuando el TLC5940 envía un 'alto', fregaderos corriente, encender el transistor PNP y el envío de un alto al conductor del LED. Cuando el TLC5940 envíe un 'bajo', ningún flujo actual en o en el alfiler, apagar el transistor PNP. Transistor NPN A no funcionará, ya que requiere actual en la base para encender, y el TLC5940 no fuente actual.
Dado que el TLC5940 regula la corriente en cada pin, no es necesario resistencia de base. Para el 2n3906, encontré que un resistor de k 3 3 en el pin set actual TLC5940 proporciona suficiente corriente. Sin embargo, tener una resistencia de 100 ohm en la base de la PNP no estaría de más.
La biblioteca TLC5940 para Arduino tiene una frecuencia PWM de predeterminado de aproximadamente 1kHz. Mientras que el CAT4101 es un driver de LED lineal, encontré que hay un gimoteo agudo, audible desde el controlador. Este gemido es generalmente un producto de un inductor vibrando a la frecuencia, pero dado que no existe ningún inductor utilizado en este controlador de LED, estoy en una pérdida para explicarlo. Disminuir la frecuencia PWM hacia abajo por debajo de ~ 244Hz disminuye el ruido, pero también introduce oscila en valores bajos de PWM. Aumento de la frecuencia PWM parece afectar a cómo dim puede ir el LED antes de apagar. La persona promedio no notara el ruido más allá de aproximadamente medio metro, y un recinto debe enmascarar completamente.
Al probar el PWM que amortigua, me di cuenta de que hay una diferencia significativa entre apagado y un valor PWM de 1. A este valor, debe ser un promedio de ~0.1456mA = (1/4095) * 600mA. Sin embargo, los LEDs indican que hay al menos unos pocos miliamperios a través del LED. Sustituyendo un 3mm que LED muestra una transición muy suave entre apagado y 1, por lo que creo es mi LED que tiene la culpa.
Recuerde: siempre conecte motivos juntos. Cada dispositivo - Arduino, controlador de LED, etc. - puede tener un potencial a tierra diferentes, y conectarlos juntos creará un terreno común. No hacerlo puede causar daños.







")




