Paso 4: Adición de PWM
Por lo que hemos cubierto todo, excepto la partida y lento funcionamiento corriente, y aunque el controlador básico en Fig 2 realizará bien todavía no hemos abordamos este problema. La manera más barata y más fácil de superar esto es utilizar modulación de anchura de pulsos o PWM. Se trata de controlar la velocidad mediante el envío de los pulsos motor de plena potencia de diferentes anchos. Esto significa que el motor tiene más potencia y par motor a bajas velocidades que un controlador estándar puede proporcionar. Además, el problema de superar la inercia, el motor arranca es eliminado porque el motor recibe una gran inyección de energía de una serie de pulsos muy cortos, permitiendo que el motor se 'Tire' de lo que parece ser la velocidad de arrastre.
Podemos crear un PWM simple sin electrónica muy compleja o costosa. Si utilizamos el chip temporizador '555' probado, hay un número de diferentes configuraciones que podemos probar. Además podemos suministrar simplemente la salida de pulso de nuestro chip temporizador para alimentar la salida final y sobrecarga el circuito descrito ya por el pulso de salida de alimentación del circuito de aquí a la base de TR1.
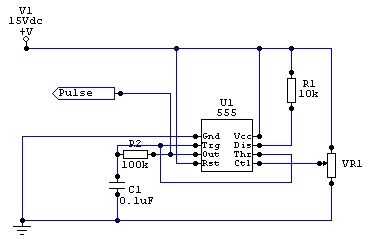
El chip 555 puede ser cableado para llevar a cabo un gran número de funciones. Es tiempo de salida se define por una red de 'RC'. Este es el efecto creado cuando un resistor y un capacitor están conectados juntos. Intentaré no entrar en detalles aquí, baste para decir que si usamos resistencias y condensadores de valores conocidos podemos obtener un pulso de sincronización de una frecuencia conocida. Hay literalmente cientos de sitios dedicados al chip 555 temporizador como calculadoras y circuitos básicos. Qué es de particular interés para nosotros es pin 5 del chip 555 DIL de 8 pines. Pin 5 se utiliza raramente en 555 circuitos estándar, pero para nosotros es un regalo del cielo. La función del pin 5 es modificar la longitud de los pulsos de salida de la viruta en relación con una referencia del voltaje aplicado en el pin. En esencia, nuestro divisor del voltaje estándar VR1, si alimenta al pin 5 del chip alterará la duración de los pulsos emitidos por el chip. Éstos entonces se pueden alimentar directamente en la etapa de salida y dan un controlador modulada de ancho de pulso.
/ * Definiciones de estilo * / tabla. MsoNormalTable {mso-estilo-name: "Tabla Normal"; mso-tstyle-rowband-tamaño: 0; mso-tstyle-colband-tamaño: 0; mso-estilo-noshow:yes; mso-estilo-parent: ""; mso-padding-alt: 0 cm 5.4pt 0 cm 5.4pt; mso-para-margen: 0 cm; mso-para-margen-abajo: .0001pt; mso-paginación: viuda-huérfano; fuente-tamaño: 10.0pt; font-family: "Times New Roman";}
La resistencia entre Vcc y el pin 7 es simplemente para evitar que se queda 'colgada'. La resistencia entre los pines 2 y 3, junto con el capacitor entre 2 y tierra establece la frecuencia de funcionamiento. El condensador debe ser un no polarizado de 0.1uF (100nF) tipo (normalmente marcada '104'). Puede utilizar un disco de cerámica si eso es todo que puedes encontrar pero te recomiendo que uses un tipo poliestireno o mica de calidad superior.
El valor de la resistencia entre pines 2 y 3 debe estar entre unos 33K y 150K. Usando un resistor de 100K va a hacer bien. El valor de la resistencia debe establecer el rango medio frecuencia a alrededor de 150Hz (pulsos por segundo). La razón es que he encontrado que motores loco modelo vibraciones por debajo de 30Hz y quejarse o dar para arriba enteramente por encima 1kHz.
El circuito mostrado no sigue la práctica habitual, no puedo recordar donde llegué por primera vez a través de él, pero lo he usado por más de 10 años como un básico generador PWM y funciona, por lo que el crédito debe ir realmente a quien diseñó la versión original. Cuando se aplica 0V al pin 5 que un multímetro va a leer los pulsos como el equivalente de entre 5 y 8 voltios en la salida, pero un osciloscopio revela que en realidad es menor que '1 v' desde los pulsos son menos del 2% de la longitud de onda. Medida que se aumenta el voltaje en el pin 5 a Vcc la salida va hasta un 98% de potencia.
Desafortunadamente, aunque la posición más baja traerá el loco a un fin, una serie de pulsos diminutos todavía está presente en los rieles, esto puede conducir a sonidos extraños provenientes de ciertos motores loco. Si usted puede conseguir el asimiento de un potenciómetro lineal de 10K con una posición de 'apagado' SPST switch entonces esta cableado a la salida de todos los pulsos en la salida de ' kill'. Si no añado un interruptor SPST en alguna parte en la salida del 555 para evitar el ruido callejero.
Este circuito no es la solución más elegante de PWM que podríamos haber llegado a utilizando el 555. Un problema potencial es que este circuito cambia la frecuencia como el ancho de pulso. Mientras la frecuencia se mantenga bien dentro de los límites que discuten esto no resultara ser un problema.
Podríamos haber hecho mejor usando dos 555. La primera se configura como un generador de frecuencia fija, provocando un segundo 555 como el generador PWM, pero eso queda para otro día.


")




")





