Paso 14: por fin! Configuración de su controlador de velocidad!
Descargar el código regulador de PID. Antes de ejecutarlo, tenemos que ajustar algunos valores.
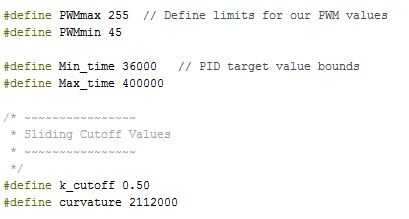
En el segundo cuadro, PWMmin, Min_time, k_cutoff y curvatura son todos los valores que apenas haya terminado de calcular. Lo único excepcional es Max_time.
Si recuerdan el paso de modelado Max Time, le pregunté a escribir el valor de Max_time que utiliza allí. Teóricamente, esto será el tiempo máximo que cualquiera de las lecturas del codificador volverá. Es el valor que desea utilizar aquí.













