Paso 16: El bucle de Control
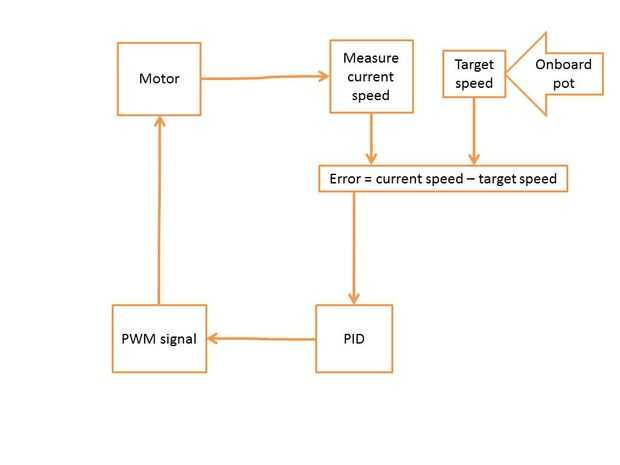
En un nivel superior, nuestro controlador funciona así:
- Mide la velocidad actual.
- Error = velocidad actual - velocidad objetivo.
- Alimentan el error nuestro PID.
- Obtener un PWM corregida de nuestro PID.
- Salida PWM corregido a nuestro motor.
- Repetir desde la parte superior.
La parte clave de esta función es el PID. Para entender mejor cómo funciona un PID, voy a rompen en componentes, es decir, proporcional, Integral los controladores derivados. No entraré en demasiados detalles sobre el funcionamiento de un PID, pero haré mi mejor para explicar cómo funciona en el contexto del regulador que acababa de usar.













