Paso 17: El controlador P
La forma más sencilla de entender un regulador proporcional, es pensar en él como una especie de resorte.
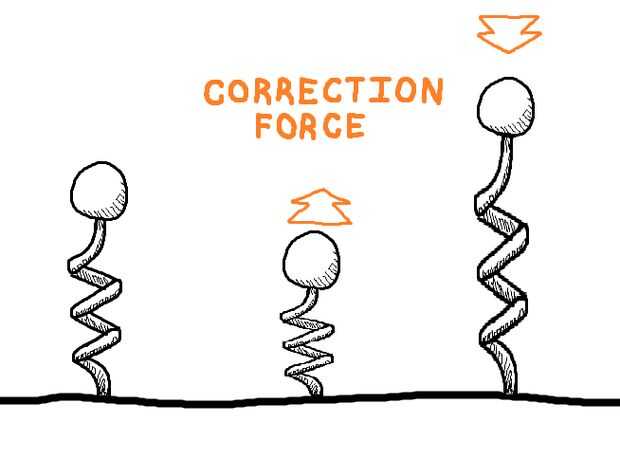
Imagina que tienes una pelota en un resorte. Si solo lo dejas sentado, es su posición neutral. Si empujarlo un poco, podía sentir la primavera empujando hacia atrás con fuerza. Más empuje la bola de su posición neutral, más difícil el resorte trata de empuje hacia atrás.
Esta fuerza que es la aplicación de la primavera se llama "fuerza correctiva". La fuerza de la fuerza correctiva de la primavera es proporcional a cómo lejos de está posición neutral nos empuje.
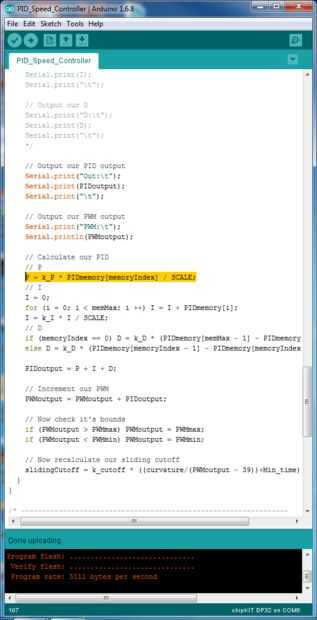
Si nos fijamos en el código de controlador de velocidad, usted puede encontrar la línea donde calculamos el valor de P para el PID (resaltada en la segunda foto de arriba). En esa línea, se toma la diferencia entre la velocidad actual de nuestro motor y la velocidad que deseamos (almacenado en el array PIDmemory) y multiplíquelo por algunas constantes. Esta es nuestra fuerza"correctiva".
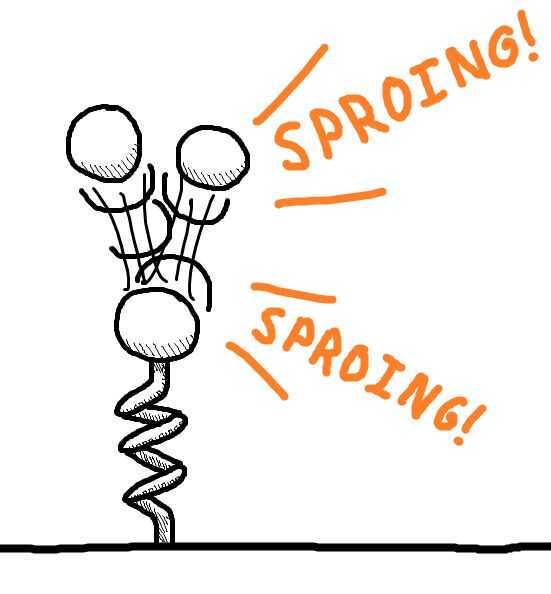
Por supuesto, los resortes son problemáticos. Volvamos a nuestra bola y resorte. Imaginar lo que sucederá si empuja la bola de su posición neutral y deje que iría. En este caso, la bola y el resorte rebotar hacia atrás y de cuarto y tener para siempre a!
Si usamos sólo una primavera, tenemos un sistema muy pobre. Del mismo modo, si sólo usamos un controlador P, contamos con un control muy pobre.













