Paso 19: I control

¿Así es más o menos, correcto? Si un controlador PD nos conseguirá el comportamiento que estamos tratando de lograr, entonces ¿cuál es el punto de la adición de un controlador Integral así?
El caso es, más controladores son PD controladores. Incluso cuando se implementa un PID completo, el efecto de suele ser muy pequeño, pero que el efecto también puede ser muy importante.
Por desgracia, controladores integrales no son tan fáciles de explicar ya que no siempre tienen una contraparte física. Así que instalaremos a un lado nuestra bola y resorte por el momento. En cambio si deseas la ilustración para este paso.
Es Ivan. Ivan es muy impaciente, y si usted toma demasiado tiempo para conseguir donde usted va, Ivan comenzará te empuja y te acelerando. Cuanto más tiempo tome, Ivan más rápido va.
Es tipo de lo que un integral regulador. Mantiene un registro de errores del pasado y les suma. Por lo tanto, como se acumula el error, el controlador integral empuja más duro y más duro.
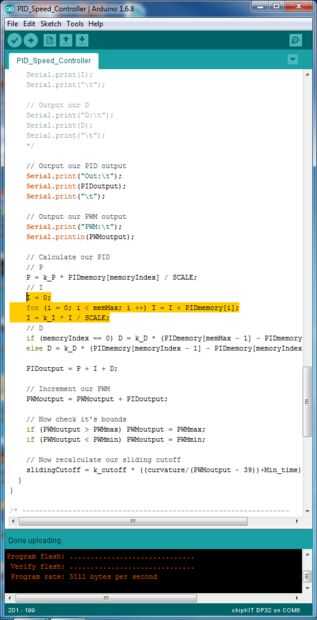
Ahora revisa el código para el controlador de velocidad. Lo calculamos es un poco más complejo que P o D. En primer lugar, sumamos todos los valores de error en nuestra memoria. Entonces tomamos ese número y escala por una constante de nuestro valor.













