Paso 20: PID constantes
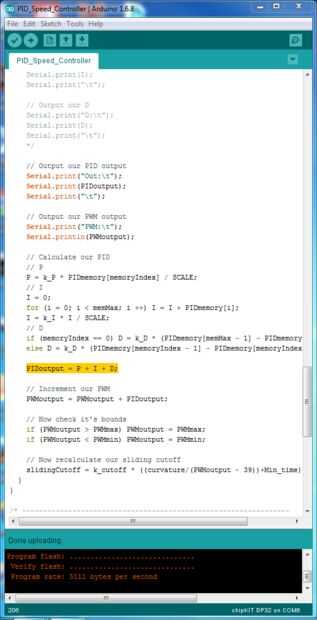
Ahora que tenemos nuestra P, I y D valores. Añadimos juntos para obtener nuestra salida del PID. Se agrega a la anterior salida PWM, para hacer la nueva salida (en la línea siguiente), que luego va a nuestro motor!
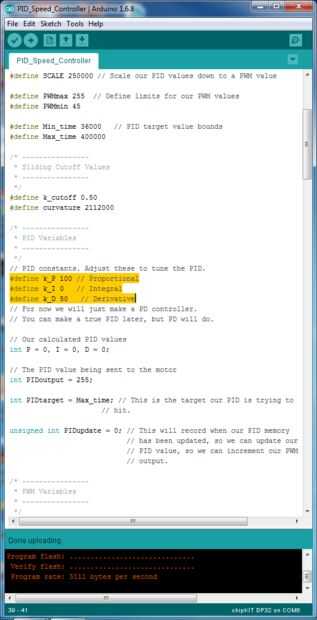
Sin embargo, como usted puede recordar de los tres pasos anteriores, las fórmulas de los tres se multiplicaron por k_P k_I y k_D. ¿Cuáles son estas constantes y lo que hacen?
Si se desplaza hacia arriba hacia la parte superior del código de controlador de velocidad, usted encontrará que estas constantes se definen. Ellos están acostumbrados a escala de la magnitud de P, I y D, por lo que podemos controlar cuánta influencia cada uno tiene en el PWM corregido de salida.
Como se puede ver, k_P es mucho mayor que k_D. Esto es bastante típico. Pero espera, k_I es cero! ¿No significa eso que no tiene ningún efecto? ¿No hacen de este un controlador PD?
Usted está absolutamente correcto! k_I es muy difícil de afinar, y como dije antes, la mayoría de las veces que bastará con un simple controlador PD, así que en este caso lo dejé hacia fuera. No dude en Añadir k_I a la mezcla para ver que pasa! Sólo sé que generalmente k_I será significativamente menor de k_D y k_P!













