Paso 6: Tomar medidas de tiempo
Descargar el programa Data_Logger que he conectado a este paso.
(Tenga en cuenta que he empezado a usar Arduino en lugar MPIDE. Eso es porque he instalado el núcleo chipKIT en Arduino. Para ello, sólo tienes que seguir las instrucciones de instalación en la página wiki de núcleo chipKIT . Como alternativa, puede copiar y pegar este código en MPIDE.)
Ir a línea 20, donde se define la constante PWMval. (Esta línea se ha destacado en la primera foto de este paso).
Este es el valor PWM que se envían para su motor. Por ahora, asegúrese de que se encuentra a 255, que es el máximo.
Cuando se carga el código en su placa, el motor inmediatamente comenzará a girar, así que asegúrese de que no va a rodar lejos en usted!
Ahora clic en serial com en la esquina superior derecha del IDE de Arduino. Debería ver una secuencia de números como los de la segunda foto. Está bien si su número es mucho mayor o mucho menor que estos. Cada uno de esos números es una medida entre tiempos de interrupción y generalmente debe reflejar cuánto tarda nuestro codificador para ir desde el inicio de una tira de cinta adhesiva a su extremo.
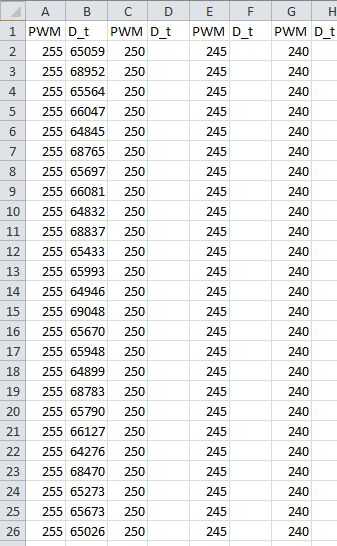
Espere dos o tres minutos para que pueda obtener suficientes valores. Desea por lo menos 100. Abrir entonces la caracterización de PWM excel hoja de cálculo (también adjunto a este paso). En la pestaña Encoder datos, copiar y pegar los valores del serie monitor en la columna de al lado donde dice "255", como en la tercera foto en este paso.
¡ Felicidades! Sólo ha tomado su primera medición!













