Paso 3: código
Necesita descargar la biblioteca de infrarrojos de http://www.arcfn.com/2009/08/multi-protocol-infrared-remote-library.html si no lo tiene ya.
Usted puede reconocer algunos de este código, y que debe mantener todo simple. Estoy usando código ampliamente disponible en internet en gran medida de arduino.cc y http://www.arcfn.com/2009/08/multi-protocol-infrared-remote-library.html para que si alguien tiene preguntas puede mirar para arriba para más referencia.
Código de LED
#include < IRremote.h >
someValue larga sin signo = 0xXXXXXXXX; donde XXXXXXXX es en los valores de su control remoto.
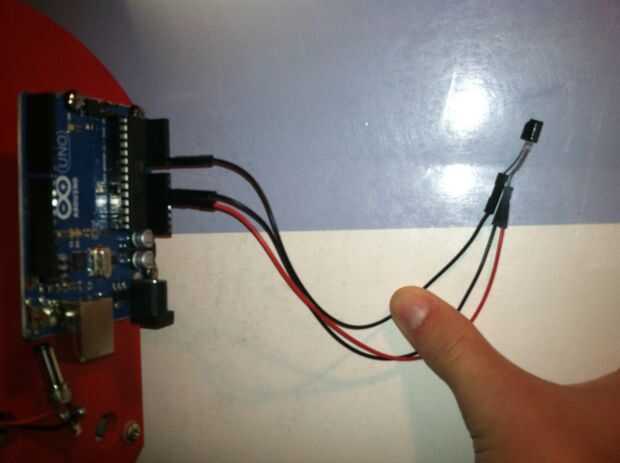
int RECV_PIN = 11;
Irrecv(RECV_PIN) de IRrecv;
resultados de la decode_results;
int led = 13;
la rutina de instalación se ejecuta una vez al presionar reset:
void setup() {}
Serial.Begin(9600);
irrecv.enableIRIn(); Inicio del receptor
Inicializa el pin digital como salida.
pinMode (led, salida);
}
una y otra vez funciona para siempre la rutina bucle:
void loop() {}
Si (irrecv.decode (y resultados)) {}
Serial.println (results.value, hexagonal);
irrecv.resume(); Recibir el siguiente valor
}
if(Results.Value == someValue) {}
digitalWrite (led, alto); Encienda el LED (alto es el nivel de voltaje)
Delay(1000); Espere un segundo
digitalWrite (led, baja); Apagar el LED por lo que la tensión baja
Delay(1000); Espere un segundo
}
}
Código de servo
#include < Servo.h >
#include < IRremote.h >
sin firmar largo valor2 = 0xXXXXXXXX; donde XXXXXXXX es en los valores de su control remoto. Llamaremos a este valor 1
sin firmar largo Value1 = 0xXXXXXXXX; donde XXXXXXXX es otro botón de su mando a distancia
int RECV_PIN = 11;
Irrecv(RECV_PIN) de IRrecv;
resultados de la decode_results;
Servo1 servo;
la rutina de instalación se ejecuta una vez al presionar reset:
void setup() {}
Serial.Begin(9600);
irrecv.enableIRIn(); Inicio del receptor
Inicializa el pin digital como salida.
servo1.Attach(10); servo de ataque para pin digital 10
}
}
una y otra vez funciona para siempre la rutina bucle:
void loop() {}
Si (irrecv.decode (y resultados)) {}
Serial.println (results.value, hexagonal);
irrecv.resume(); Recibir el siguiente valor
}
if(Results.Value == Value1) {}
servo1.Write(179);
}
if(Results.Value == Value1) {}
servo1.Write(1);
}
}



")









