Paso 3: Contacto con el puerto serie en PHP
<? php
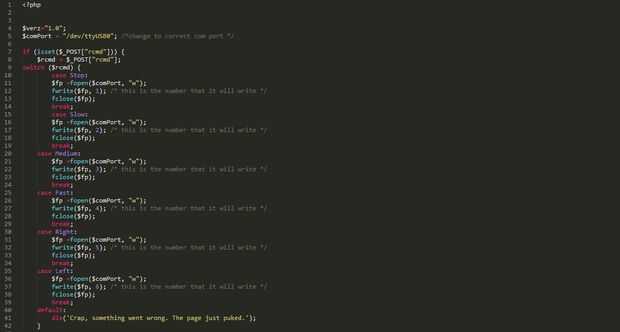
$verz = "1.0";
$comPort = "/ dev/ttyUSB0"; / * cambio corregir puerto com * /
Si (isset($_POST["rcmd"])) {}
$rcmd = $_POST ["rcmd"];
interruptor ($rcmd) {}
caso de parada:
$fp = fopen ($comPort, "w");
fwrite ($fp, 1); / * Este es el número que va a escribir * /
fclose($FP);
rotura;
caso lenta:
$fp = fopen ($comPort, "w");
fwrite ($fp, 2); / * Este es el número que va a escribir * /
fclose($FP);
rotura;
caso medio:
$fp = fopen ($comPort, "w");
fwrite ($fp, 3); / * Este es el número que va a escribir * /
fclose($FP);
rotura;
caso rápidamente:
$fp = fopen ($comPort, "w");
fwrite ($fp, 4); / * Este es el número que va a escribir * /
fclose($FP);
rotura;
caso de derecho:
$fp = fopen ($comPort, "w");
fwrite ($fp, 5); / * Este es el número que va a escribir * /
fclose($FP);
rotura;
caso izquierdo:
$fp = fopen ($comPort, "w");
fwrite ($fp, 6); / * Este es el número que va a escribir * /
fclose($FP);
rotura;
por defecto:
Die (' mierda, algo salió mal. La página a vomitarla.');
}
}
? >
< html >
< cuerpo >
< center >< h1 > Arduino desde PHP ejemplo < / h1 >< b > versión <? php echo $verz;? >< /b >< / center >
¿< método del formulario = "post" acción = "<? php echo $PHP_SELF;? > ">
& nbsp & nbsp & nbsp & nbsp
< tipo de entrada = 'Enviar' valor de = "Izquierda" nombre = "rcmd" >
& nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp
< tipo de entrada = 'Enviar' valor de = "Derecha" nombre = "rcmd" >< br / >
< br / >
& nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp & nbsp
< tipo de entrada = 'Enviar' valor de = nombre de "Stop" = "rcmd" >< br / >
< br / >
& nbsp & nbsp & nbsp
< tipo de entrada = 'Enviar' valor de = "Lento" nombre = "rcmd" >
< tipo de entrada = 'Enviar' valor de = "Medio" nombre = "rcmd" >
< tipo de entrada = 'Enviar' valor de = nombre "Rápido" = "rcmd" >
< br / >
< br / >
< br / >
< br / >
< br / >
< br / >
< / form >
< /body >
< / html >
 o C# (Windows)")

")


")



")



