Paso 1: Conectar los motores
![]()
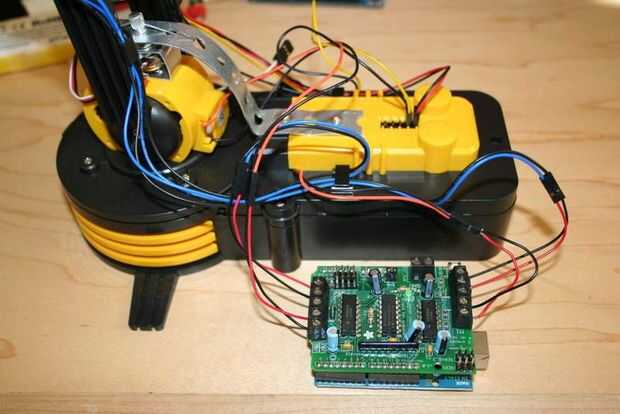
Desde el Adafruit Motor escudo sólo tiene cuatro controladores de motor, sólo vamos a conectar las cuatro articulaciones de brazo OWI (no los "dedos"). Si desea controlar los dedos, también puede conectar un relé a una de las salidas digitales en la pantalla y pones microinterruptores en los dedos para marcar "abren" y "cerraron". Pero no podía ser molestado yo--los dedos no son tan importantes.
Sólo utilice un poco sólido alambre (no trenzado) para conectar cada conector del motor del OWI a una salida Motor Shield. Tira de un cuarto de pulgada en cada extremo y conecte un extremo a los conectores motor brazo de Robot OWI y atornillar los otros extremos de los conectores de Adafruit protector de Motor, como se muestra aquí.



 con pfodApp")






")


