Paso 3: Edificio electrónica:-


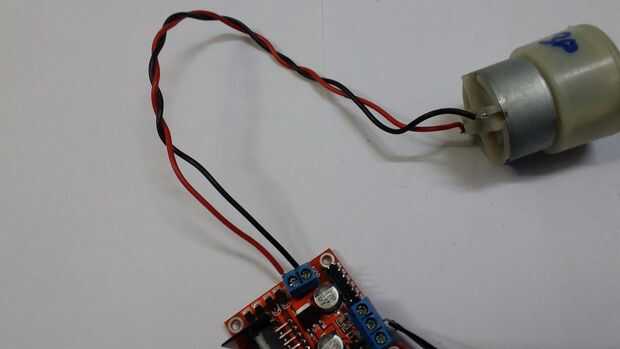

Si está utilizando dos motores para un robot (etc.) Asegúrese de que la polaridad de los motores es la misma en ambas entradas.
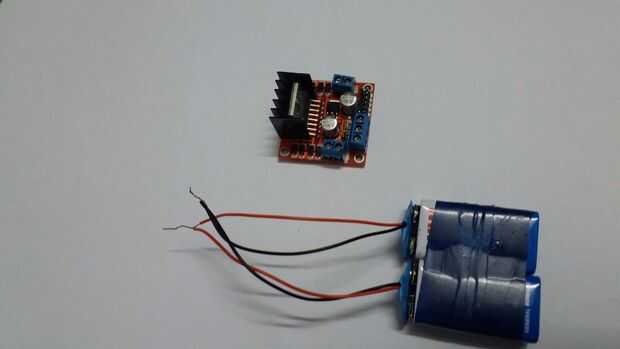
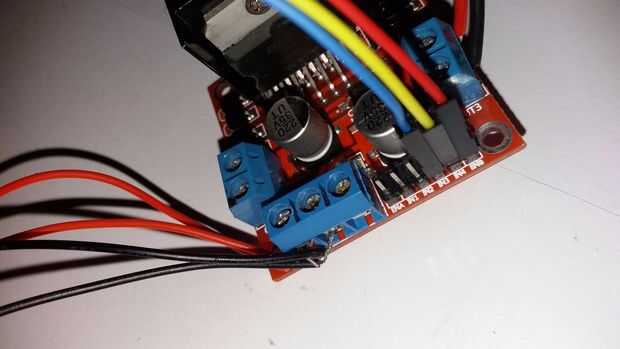
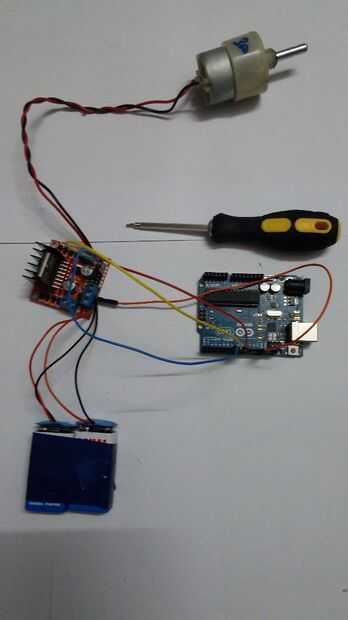
A continuación, conecte el suministro de energía, el positivo al pin 4 del módulo y negativo/GND al pin 5. Si usted proporciona es hasta 12V puede dejar en el puente de 12V (punto 3 de la imagen de arriba) y 5V estará disponible en el pin 6 en el módulo. Esto puede ser alimentado al pin de 5V de tu Arduino a la energía de la fuente de alimentación de los motores. No olvide conectar Arduino GND al pin 7 del módulo así como para completar el circuito. Ahora necesitas seis clavijas de salida digital de tu Arduino, dos de los cuales deban ser pernos PWM (modulación de anchura de pulso). Pines PWM son denotadas por la tilde ("~") al lado el número de pin, por ejemplo en la imagen de pernos digitales de la Arduino Uno. Por último, conecte las clavijas de salida digital de Arduino al módulo controlador. En nuestro ejemplo tenemos dos motores de la C.C., para que pernos digitales D9, D8, D7 y D6 se conectará a pernos IN1, IN2, IN3 y IN4 respectivamente. Luego conecte D10 a pin de módulo 7 (quitar el puente primero) y D5 con conector de módulo 12 (otra vez, quite el puente). La dirección del motor se controla mediante el envío de una señal alta o baja a la unidad para cada motor (o canal). Por ejemplo para un motor, un alto a la IN1 y una baja a IN2 hará que se gire en una dirección y una baja y alta hará que se convertir en la otra dirección. Sin embargo los motores no gire hasta que se establezca un alto el activar sujetará (7 para el motor uno, 12 para dos motores). Y se pueden apagar con una baja para el mismo pasador (es). Sin embargo si usted necesita controlar la velocidad de los motores, la señal PWM el pin digital conectado al pin enable puede hacerse cargo de él. Esto es lo que hemos hecho con el bosquejo de la demostración de motor de DC. Dos motores DC y un Arduino Uno están conectados como se describe anteriormente, junto con una fuente externa.



![[Tutorial] Controlar Brazo Mecanico K-680 con el L293D y de MSP430G2](https://foto.askix.com/thumb/170x110/3/0d/30d4f23c761f60442a4ec8715618778a.png "[Tutorial] Controlar Brazo Mecanico K-680 con el L293D y de MSP430G2")









