Paso 3: cableado
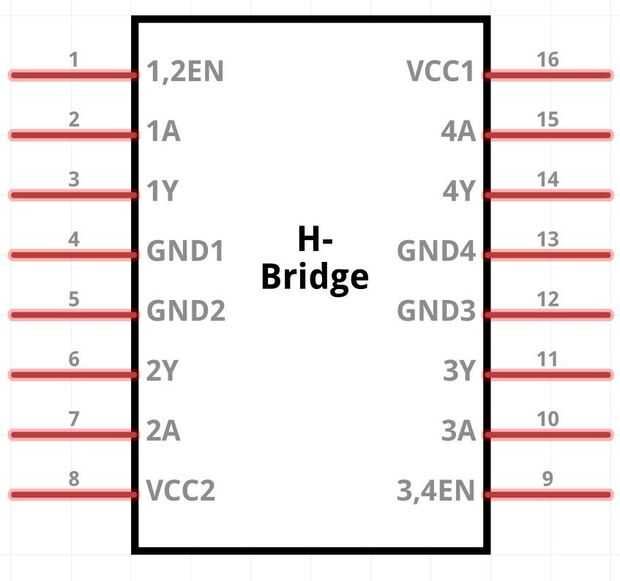
El Puente H nos permite controlar cuatro motores de corriente continua en una dirección, o dos motores de corriente continua en ambas direcciones.
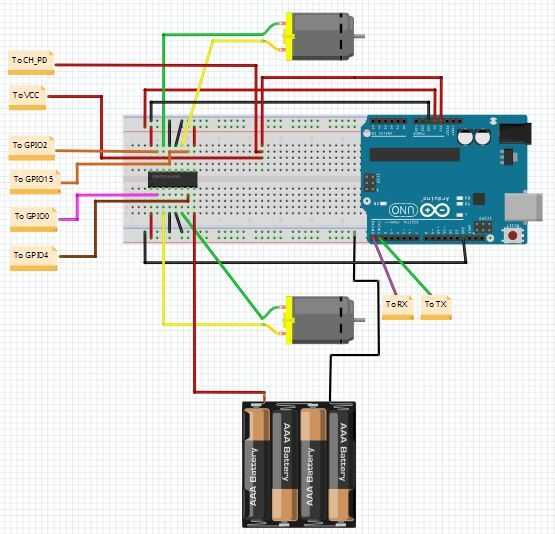
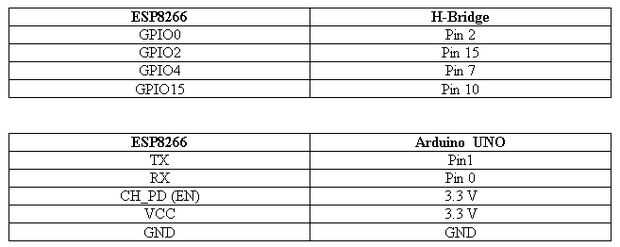
Los pines 1 y 9 se usan para activar los motores. Pines 2 y 7 cambian la dirección de un motor, mientras que los pines 10 y 15 cambian la dirección del otro motor. Estos pines deben estar conectado a una salida de PWM para controlar la velocidad de los motores.
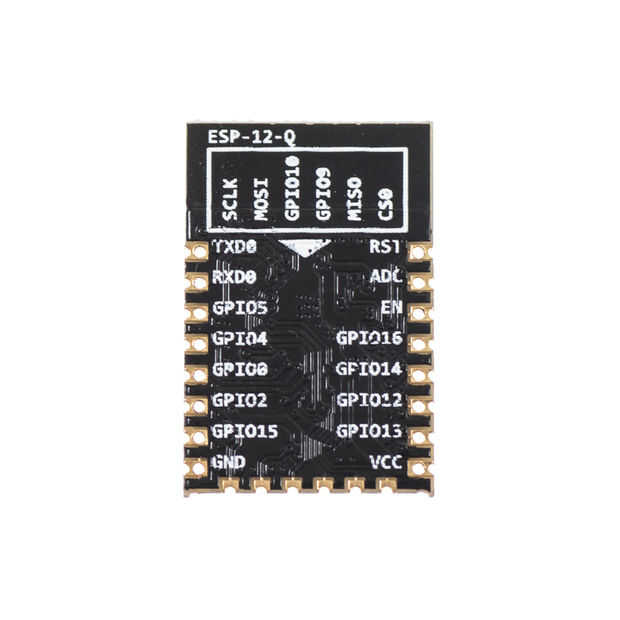
Por suerte el ESP-12GPIOs pueden producir señales PWM para que puedas elegir cualquier cuatro GPIOs del módulo. Decidimos utilizar GPIOs 0, 2, 4 y 15. Pines 3 y 6 conectan a uno de los motores, mientras los pines 11 y 14 se conectan a la otra. Pines 4, 5, 12 y 13 se conecta a tierra. Pin 8 se utiliza para los motores con una fuente externa de energía. Este pin está conectado al borne positivo de las baterías 4-AA, que proveen ~ 6V. Puede utilizar un máximo de 36 V. Pin 16 se utiliza para la alimentación de la lógica de IC.








")


")

