Paso 5: Prueba el nuevo Servo continuo

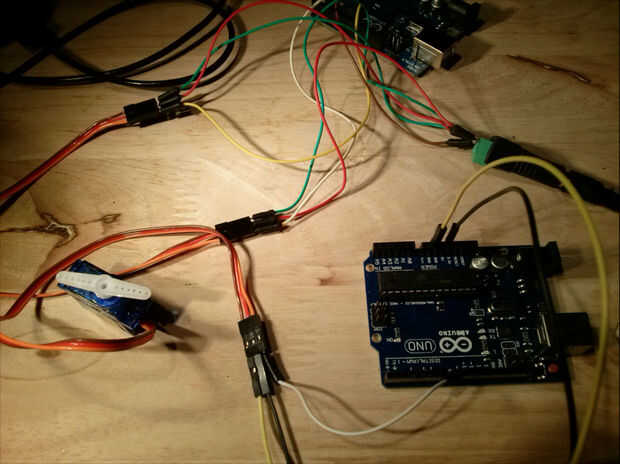
Ahora que tienes todo puesto detrás juntos, es tiempo para probar el servo y asegúrese de que la conversión tuvo éxito. Un Arduino es perfecto para esto y todo lo que necesitas para probarlo es tu Arduino (estamos utilizando un tablero UNO), 3 cables de puente y un cable USB para conectar a la ONU a nuestro ordenador. En los servos, el cable marrón es tierra, rojo es positivo, y naranja es para la señal. Conectar toma de tierra a la tierra en su Arduino, positivo a 5V en su Arduino y el cable de señal al pin 9 en su Arduino. (Nota: un servo bajo cualquier tipo de carga no debe ser conectado a tu Arduino como este, podría sobregirar amperios y causar su Arduino restablecer o burn out. Pero aquí solo estamos probando la rotación y sólo por un corto tiempo.)
Escrito y había subido el siguiente código:
Conversión de servo continuo de prueba
#include servo myservo;
void setup() {}
myservo.Attach(9);
}
void loop() {}
myservo.Write(180); rotación a la derecha
Delay(2000); duración de la rotación en la EM
myservo.Detach(); separar el servo para evitar el efecto "arrastramiento"
Delay(500); breve pausa
myservo.Attach(9); Vuelva a colocar el servo en el pin 9
myservo.Write(0); rotación a la izquierda
Delay(2000); duración de la rotación en la EM
myservo.Detach(); separar el servo para evitar el efecto "arrastramiento"
Delay(500); corta pausa myservo.attach(9); Vuelva a colocar el servo en el pin 9 antes de bucle
}
180 hace que el servo gire hacia la derecha a toda velocidad. 0 hace que girar hacia la izquierda a toda velocidad. Valores de 45 y 135, por ejemplo, tienen el giro del servo más lento en sus respectivas direcciones, mientras que 90 teóricamente debe tener el servo en el resto. Sin embargo, decimos "teóricamente" porque nunca realmente perfectamente centrado en el servo. Esto hace que el servo a arrastrarse muy lentamente en una dirección u otra. Además de ser lo molesto también las ruinas de la exactitud de su proyecto. Así que para evitarlo arrastramiento, adjuntar y separar el servo cuando sea necesario en el código anterior de Arduino. Separar hojas unpowered y por lo tanto completamente en reposo.
Pensamientos de cierre
Ahora tienes un servo continuamente giratorio que se puede utilizar solo para diversos proyectos o par hasta un robot o cualquier cosa que puedas imaginar. Hay sin duda muchas otras maneras de hacer este hack particular. Y obviamente muchas mejores opciones que puede utilizar si tienes el tiempo y el dinero a la fuente que un servo de rotación continua hackeado. Pero en caso de que usted tiene un montón ahí y quiere una solución rápida, aquí es.
En el Zoo de fabricante has usado este hack en el desarrollo de nuestro robot Arduino de código abierto y actualmente se utilizan para un próximo proyecto de IoT. Un alimentador automático de pescado que estamos rediseñando también utiliza este mismo hack y operado durante un año y medio sin problemas. Sólo tenga cuidado con la posición final del potenciómetro antes de pegarlas. Si usted no centrarlo, el hack todo fallará. ¡Buena suerte!

")

")









")